|
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ąŠą┐ąĖčüą░ąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (Generic Physical Interface Driver, PID), ą║ąŠč鹊čĆčŗą╣ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ, čéčĆąĄą▒čāąĄą╝ąŠą╣ ą┤ą╗čÅ ąĖąĮč鹥ą│čĆą░čåąĖąĖ čŹč鹊ą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąŠ čüą╗čāąČą▒ąŠą╣ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (File System Service, FSS) ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices. ą¦č鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī č鹥čĆą╝ąĖąĮčā PID, ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąĖą┤ąĄčé ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ čāčüčéčĆąŠą╣čüčéą▓čā čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (mass storage media), ą┤ąŠą╗ąČąĄąĮ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░. ąó. ąĄ. ą┤čĆą░ą╣ą▓ąĄčĆ PID čŹč鹊 ąĮąĄ ą┐čĆąŠčüč鹊ą╣, ą░ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, čāčćąĖčéčŗą▓ą░čÄčēąĖą╣ ąĮąĄ č鹊ą╗čīą║ąŠ čüą┐ąĄčåąĖčäąĖą║čā čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ, ąĮąŠ ąĖ ą║ąŠąĮč鹥ą║čüčé čĆą░ą▒ąŠčéčŗ čüąŠ čüą╗čāąČą▒ąŠą╣ FSS.
ąÆą╝ąĄčüč鹥 čü čüąĖčüč鹥ą╝ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ąŠč鹊ą▓čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID (čüą╝. ą║ą░čéą░ą╗ąŠą│ %ProgramFiles% \ Analog Devices \ VisualDSP 5.0 \ Blackfin \ lib \ src \ drivers \ pid \ ąĖ ąĄą│ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ atapi, nand, ramdisk, sdh ąĖ usb) ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą║ ąĮąĖą╝ (čüą╝. ą║ą░čéą░ą╗ąŠą│ %ProgramFiles% \ Analog Devices \ VisualDSP 5.0 \ Blackfin \ docs \ drivers \ pid \ ąĖ ąĄą│ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ atapi, nand, ramdisk, sdh ąĖ usb). ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé (Generic_PID_Design_Document.pdf) ą┤ąŠą┐ąŠą╗ąĮčÅąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮč鹊ą▓, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą│ąŠč鹊ą▓čŗą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝, ąĖ ą╝ąŠąČąĄčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčīčüčÅ ą║ą░ą║ čłą░ą▒ą╗ąŠąĮ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ, ą│ą┤ąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ čüčéčĆąŠą║ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ PID (ą╗ąĖą▒ąŠ ą▓ čäą░ą╣ą╗ąĄ, ą╗ąĖą▒ąŠ ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ), ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠą│ą╗ą░čłąĄąĮąĖąĄ:
ŌĆó {ns} ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ąĖą╝ąĄąĮ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ adi.
ŌĆó {iface} ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čćą░čüčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, ąŠčéąĮąŠčüčÅčēąĄą│ąŠčüčÅ ą║ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝čā ąĖąĮč鹥čĆč乥ą╣čüčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ atapi.
ŌĆó {pid-ident} ={ns}_{iface} ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüčéčĆąŠą║čā ą▓ ąĮąĖąČąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ adi_atapi.
ŌĆó ąĢčüą╗ąĖ ą╗čÄą▒ąŠąĄ ąĖąĘ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą▓ąĄčĆčģąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ {PID-IDENT}, č鹊 čüčéčĆąŠą║ą░ ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║ ąČąĄ, ąĮąŠ ąŠąĮą░ ąĮą░ą┐ąĖčüą░ąĮą░ ąĘą░ą│ą╗ą░ą▓ąĮčŗą╝ąĖ ą▒čāą║ą▓ą░ą╝ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ: ADI_ATAPI.
ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ čäą░ą╣ą╗čŗ. ą£ąŠą┤čāą╗ąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID ą┐ąŠą┤ą║ą╗čÄčćą░čÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ:
services/services.h. ąŁčéąĖ čäą░ą╣ą╗čŗ čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ ąĖ čé. ą┤. ą┤ą╗čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒ (System Services Library, SSL) ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices.
drivers/adi_dev.h. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ ąĖ čé. ą┤. ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ [3] (Device Manager) ąĖ ąŠą▒čēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ čāčüčéčĆąŠą╣čüčéą▓.
services/fss/adi_fss.h. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ ąĖ čé. ą┤. ą┤ą╗čÅ čüą╗čāąČą▒čŗ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ [2] (File System Service, FSS).
drivers/pid/{iface}/{pid-ident}.h. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ ąĖ čé. ą┤. ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (Physical Interface Driver, PID).
string.h. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ ąĖ čé. ą┤. ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą┐ą░ą╝čÅčéąĖ.
ążą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čäą░ą╣ą╗ą░čģ, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗčģ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ VisualDSP++ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ:
Blackfin/lib/src/drivers/ata/{iface}/{pid-ident}.c. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ą▓ąĄčüčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (PID). ąÆąĄčüčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ čÅąĘčŗą║ąĄ C, ąĮą░ čŹč鹊ą╝ čāčĆąŠą▓ąĮąĄ ąĮąĄčé ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░.
ąöčĆą░ą╣ą▓ąĄčĆčŗ ąĮąĖąČąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ (Lower Level Drivers). ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ąĮąŠčüąĖč鹥ą╗čÄ ą┤ą░ąĮąĮčŗčģ, ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą┐čéąĖč湥čüą║ąĖą╣ ą┐čĆąĖą▓ąŠą┤, ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ SPORT ąĖ TWI ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
[ąóčĆąĄą▒čāąĄą╝čŗąĄ čĆąĄčüčāčĆčüčŗ]
ąöčĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ čĆąĄčüčāčĆčüčŗ. ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ąŠą┐ąĖčüą░ąĮčŗ čĆąĄčüčāčĆčüčŗ, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ąŚą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čÅą▓ąĮąŠą│ąŠ čāą┐ąŠą╝ąĖąĮą░ąĮąĖčÅ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ, ą┤čĆą░ą╣ą▓ąĄčĆ PID ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĪąĖčüč鹥ą╝ąĮčŗąĄ ąĪą╗čāąČą▒čŗ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗čÄą▒čŗą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝. ąśąĮč乊čĆą╝ą░čåąĖčÅ ą▓ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ čĆąĄčüčāčĆčüąŠą▓ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ, čéą░ą║ąĖčģ ą║ą░ą║ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ DMA, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ.
ąÆčüąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą┐ą░ą╝čÅčéąĖ, ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čüčéčĆčāą║čéčāčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ, čüąŠąĘą┤ą░ąĮąĮčŗčģ ą▓ čüč鹥ą║ąĄ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ č湥čĆąĄąĘ čäčāąĮą║čåąĖąĖ čåąĄąĮčéčĆą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ FSS: _adi_fss_malloc(), _adi_fss_realloc() ąĖ _adi_fss_free(). ąŁčéąĖ čäčāąĮą║čåąĖąĖ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒ąĄčĆčéą║ą░ą╝ąĖ ą┤ą╗čÅ ą╗ąĖą▒ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čäčāąĮą║čåąĖą╣ libc (heap_malloc(), heap_realloc() ąĖ heap_free()), ą╗ąĖą▒ąŠ ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ čäčāąĮą║čåąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą┐čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ čüą╗čāąČą▒čŗ FSS. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čüą┐ąŠčüąŠą▒ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą║ą░ą║ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ, ąĘą░čĆą░ąĮąĄąĄ ąĖąĘą▓ąĄčüčéąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ. ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ čäčāąĮą║čåąĖąĖ ą▓ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ PID ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐ąĄčĆą░č鹊čĆčŗ:
extern void *_adi_fss_malloc( int id, size_t size );
extern void _adi_fss_free( int id, void *p );
extern void *_adi_fss_realloc( int id, void *p, size_t size );
ąĪą╗čāąČą▒ąŠą╣ FSS ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ 2 čéąĖą┐ą░ ą║čāčć [2]: ą║čāčćą░ ą║čŹčłą░ ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą▒čāč乥čĆąŠą▓ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ąĖčģ ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ ąĖą╗ąĖ ą╝ąĄčüč鹊 ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čć DMA, ąĖ ąŠčüąĮąŠą▓ąĮą░čÅ (ąŠą▒čēą░čÅ) ą║čāčćą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ąŠą▒čŖąĄą║č鹊ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ. ą¤čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ PID čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą╝ąŠą│čāčé čāą║ą░ąĘą░čéčī č鹊ą╗čīą║ąŠ ąĖąĮą┤ąĄą║čü ą║čāčćąĖ ą┤ą╗čÅ ą║čāčćąĖ ą║čŹčłą░; PID ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčüąĮąŠą▓ąĮčāčÄ ą║čāčćčā, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ ą▓ FSS. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą▒čēąĄą╣ ą║čāčćąĖ PID ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą┤ą░čéčī -1 ą║ą░ą║ ą░čĆą│čāą╝ąĄąĮčé id, ą║ąŠč鹊čĆčŗą╣ FSS ą▒čāą┤ąĄčé ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░čéčī ą║ą░ą║ ąĘą░ą┐čĆąŠčü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮą┤ąĄą║čü ąŠą▒čēąĄą╣ ą║čāčćąĖ, ą║ąŠč鹊čĆčŗą╣ čüąŠčģčĆą░ąĮąĄąĮ ą▓ FSS. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĖąĮą┤ąĄą║čüą░ ą║čāčćąĖ ą║čŹčłą░ PID ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī -1.
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą║čāčćąĖ ą║čŹčłą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ą░čĆąŠą╣ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_FSS_CMD_SET_CACHE_HEAP_ID, (void*)CacheHeapIndex }
ąŚą┤ąĄčüčī CacheHeapIndex čŹč鹊 ą╗ąĖą▒ąŠ ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ heap_table_t heap_table (čüą╝. čäą░ą╣ą╗ < ąĖą╝čÅ_ą┐čĆąŠąĄą║čéą░ >_heaptab.c), ą╗ąĖą▒ąŠ ąĖąĮą┤ąĄą║čü, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╗čāč湥ąĮ ąĖąĘ ą▓čŗąĘąŠą▓ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║čāčćąĖ (čäčāąĮą║čåąĖčÅ heap_install):
static u8 myheap[1024];
#define MY_HEAP_ID 1234
...
int CacheHeapIndex = heap_install ((void *)&myheap, sizeof(myheap), MY_HEAP_ID);
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą║čāčć ą╝ąŠąČąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ąŠą║čĆčāąČąĄąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĖą┤ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą▓čŗą▒čĆą░ąĮąĮąŠąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą║čāčćąĖ, č鹊 ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ FSS ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ, čćč鹊ą▒čŗ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą░čĆą│čāą╝ąĄąĮčé ąĖąĮą┤ąĄą║čüą░ ą║čāčćąĖ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ą║ąĖąĄ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ - ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
DMA. ąÜą░ą║ąĖąĄ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ąĮą░ą╗čŗ DMA - ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ąóą░ą╣ą╝ąĄčĆčŗ. ąöąŠą╗ąČąĮčŗ ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░ą╣ą╝ąĄčĆčŗ - ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ąĪąĄą╝ą░č乊čĆčŗ. ąöčĆą░ą╣ą▓ąĄčĆ PID čéčĆąĄą▒čāąĄčé 2 čüąĄą╝ą░č乊čĆąŠą▓, ąŠą┤ąĖąĮ ą┤ą╗čÅ čüąĄą╝ą░č乊čĆą░ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (Lock Semaphore), čćč鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī 菹║čüą║ą╗čĹʹĖą▓ąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ PID ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░, ąĖ ąĄčēąĄ ąŠą┤ąĖąĮ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čć ą┤ą░ąĮąĮčŗčģ. ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą▓čüąĄčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ ąĖą╝ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĪą╗čāąČą▒ą░ ąĪąĄą╝ą░č乊čĆąŠą▓.
ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (Real-Time Clock, RTC). ąĪą╗čāąČą▒ą░ RTC ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čäą╗ą░ą│ąĖ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čäą╗ą░ą│ąĖ [4] - ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ąÆčŗą▓ąŠą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID ą╗čÄą▒čŗčģ ąĮąŠąČąĄą║ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. ąÜ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čäą╗ą░ą│ąŠą▓ (ąĮąŠąČą║ąĖ GPIO), čéą░ą║ ąĖ ą▓čŗą▓ąŠą┤čŗ, ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĮčŗąĄ ą┐ąŠą┤ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠčåąĄčüčüąŠčĆą░.
[ążčāąĮą║čåąĖąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID]
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ. ąöčĆą░ą╣ą▓ąĄčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ.
ąóą░ą▒ą╗ąĖčåą░ 2. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
| ADI_DEV_DIRECTION |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_DIRECTION_INBOUND |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| ADI_DEV_DIRECTION_BIDIRECTIONAL |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąŠą▒ą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. |
ą£ąĄč鹊ą┤čŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąöčĆą░ą╣ą▓ąĄčĆ PID ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆąĄąČąĖą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ: čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓, ADI_DEV_MODE_CHAINED. ąÆ č鹥ą╗ąĄ čüą╗čāąČą▒čŗ FSS ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą║ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąĢčüą╗ąĖ PID čĆą░ą▒ąŠčéą░ąĄčé čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ, ą▒ąĄąĘ FSS (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ čĆąĄąČąĖą╝ standalone mode), č鹊 ą▓ą░ąČąĮąŠ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠčéą┐čĆą░ą▓ą║čā ą┤čĆą░ą╣ą▓ąĄčĆčā PID čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_DEV_CMD_SET_DATAFLOW_METHOD, (void*)ADI_DEV_MODE_CHAINED },
ąóąĖą┐čŗ ą▒čāč乥čĆąŠą▓. ąöčĆą░ą╣ą▓ąĄčĆ PID ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ čéąĖą┐ ą▒čāč乥čĆą░ ADI_DEV_1D_BUFFER. ąŁč鹊 ą╗ąĖąĮąĄą╣ąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. ą×ąĮ ąŠą▒ąĄčĆąĮčāčé čüčéčĆčāą║čéčāčĆąŠą╣ čüčāą┐ąĄčĆą▒čāč乥čĆą░ FSS (FSS Super Buffer Structure). ąÆ ą▒čāč乥čĆąĄ ADI_DEV_1D_BUFFER ąĖą╝ąĄčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ:
CallbackParameter. ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ čüčāą┐ąĄčĆą▒čāč乥čĆą░ FSS. ą×ąĮ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą▓ąĮčāčéčĆąĖ PID. ąĢčüą╗ąĖ PID ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA (ąĮą░ą┐čĆąĖą╝ąĄčĆ,ą« ą▓ąŠąĘą▓čĆą░čēą░ąĄčé FALSE ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_DEV_CMD_GET_PERIPHERAL_DMA_SUPPORT), č鹊 čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ callback-čäčāąĮą║čåąĖčÄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ProcessedFlag. ąŁč鹊 ą┐ąŠą╗ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID.
pAdditionalInfo. ąŁč鹊 ą┐ąŠą╗ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID.
[ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ (Command ID)]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ/čéčĆąĄą▒čāčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą┤ąĄą╗ąĄąĮčŗ ąĮą░ 3 čüąĄą║čåąĖąĖ. ą¤ąĄčĆą▓ą░čÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ PID. ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąŠčéąĮąŠčüčÅčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čüą┐ąĄčåąĖčäąĖą║ąĄ PID. ąś ąĮą░ą║ąŠąĮąĄčå, ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ą┐ąŠą┤čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ąŠčéčĆą░ąČą░čÄčēąĖąĄ čüą┐ąĄčåąĖčäąĖą║čā čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÜąŠą╝ą░ąĮą┤čŗ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ adi_dev_Control(). ążčāąĮą║čåąĖčÅ adi_dev_Control() ą┐čĆąĖąĮąĖą╝ą░ąĄčé 3 ą░čĆą│čāą╝ąĄąĮčéą░:
DeviceHandle. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ ADI_DEV_DEVICE_HANDLE, ą║ąŠč鹊čĆčŗą╣ čāąĮąĖą║ą░ą╗čīąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊čé čģąĄąĮą┤ą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą║ą╗ąĖąĄąĮčéą░ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ą▓ąŠąĘą▓čĆą░čéą░ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ adi_dev_Open().
CommandID. ąŻ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čéąĖą┐ u32, ąĖ ąŠąĮ ąĘą░ą┤ą░ąĄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ.
Value. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ void*, ąĖ ąĄą│ąŠ čüą╝čŗčüą╗ ąĖ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ CommandID.
ąÜąŠą╝ą░ąĮą┤čŗ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗąĄ Device Manager. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤, ą║ąŠč鹊čĆčŗąĄ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čüąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ ą▒čāą┤čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čŹčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ.
ADI_DEV_CMD_TABLE. ąŚą░ą┤ą░ąĄčé čéą░ą▒ą╗ąĖčåčā ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆčā. ą¤ą░čĆą░ą╝ąĄčéčĆ Value ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą░ą┤čĆąĄčü čéą░ą▒ą╗ąĖčåčŗ (ADI_DEV_CMD_VALUE_PAIR *).
ADI_DEV_CMD_END. ą×ą▒ąŠąĘąĮą░čćą░ąĄčé ą║ąŠąĮąĄčå čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤. ą¤ą░čĆą░ą╝ąĄčéčĆ Value ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ (ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ą▓ąĄąĮ NULL).
ADI_DEV_CMD_PAIR. ą¤ąĄčĆąĄą┤ą░ąĄčé ąŠą┤ąĮčā ą┐ą░čĆčā ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. ą¤ą░čĆą░ą╝ąĄčéčĆ Value ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą░ą┤čĆąĄčü čŹč鹊ą╣ ą┐ą░čĆčŗ (ADI_DEV_CMD_VALUE_PAIR *).
ADI_DEV_CMD_SET_SYNCHRONOUS. ąĀą░ąĘčĆąĄčłą░ąĄčé/ąĘą░ą┐čĆąĄčēą░ąĄčé čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: TRUE/FALSE.
ADI_DEV_CMD_GET_INBOUND_DMA_CHANNEL_ID. ąÆąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą║ą░ąĮą░ą╗ą░ DMA (DMA channel ID) ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: čāą║ą░ąĘą░č鹥ą╗čī u32* (čÅč湥ą╣ą║ą░ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ channel ID).
ADI_DEV_CMD_GET_OUTBOUND_DMA_CHANNEL_ID. ąÆąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą║ą░ąĮą░ą╗ą░ DMA (DMA channel ID) ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: čāą║ą░ąĘą░č鹥ą╗čī u32* (čÅč湥ą╣ą║ą░ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ channel ID).
ADI_DEV_CMD_SET_INBOUND_DMA_CHANNEL_ID. ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą║ą░ąĮą░ą╗ą░ DMA (DMA channel ID) ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: ADI_DMA_CHANNEL_ID (DMA channel ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA).
ADI_DEV_CMD_SET_OUTBOUND_DMA_CHANNEL_ID. ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą║ą░ąĮą░ą╗ą░ DMA (DMA channel ID) ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: ADI_DMA_CHANNEL_ID (DMA channel ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA).
ADI_DEV_CMD_SET_DATAFLOW_METHOD. ąŚą░ą┤ą░ąĄčé ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ: ADI_DEV_MODE_CHAINED. Value: ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_DEV_MODE (ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖąĄ ADI_DEV_MODE_CHAINED).
ą×ą▒čēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ čāčüčéčĆąŠą╣čüčéą▓. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą╝ąĮąŠą│ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ ąĖąĘ čŹč鹊ą│ąŠ čüą┐ąĖčüą║ą░ ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ čéą░ą║ąČąĄ ąĖ ą║ą╗ą░čüčüąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ADI_DEV_CMD_GET_INBOUND_DMA_PMAP_ID. ąÆąĄčĆąĮąĄčé ą┐čĆąĖą▓čÅąĘą║čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (PMAP ID) ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓ą░ąČąĮą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ DMA. Value: u32* (čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖą▓čÅąĘą║ąĖ PMAP).
ADI_DEV_CMD_GET_OUTBOUND_DMA_PMAP_ID. ąÆąĄčĆąĮąĄčé ą┐čĆąĖą▓čÅąĘą║čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (PMAP ID) ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓ą░ąČąĮą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ DMA. Value: u32* (čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖą▓čÅąĘą║ąĖ PMAP).
ADI_DEV_CMD_SET_DATAFLOW. ąĀą░ąĘčĆąĄčłą░ąĄčé/ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą×ą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ą░. Value: TRUE/FALSE.
ADI_DEV_CMD_GET_PERIPHERAL_DMA_SUPPORT. ą¤ąŠąĘą▓ąŠą╗čÅąĄčé čāąĘąĮą░čéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąÜąŠą╝ą░ąĮą┤ą░ ąĖą╝ąĄąĄčé ą▓ą░ąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. Value: u32* (čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ TRUE ąĖą╗ąĖ FALSE).
ADI_DEV_CMD_SET_ERROR_REPORTING. ąĀą░ąĘčĆąĄčłą░ąĄčé/ąĘą░ą┐čĆąĄčēą░ąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ (error reporting) ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ą░. Value: TRUE/FALSE.
ADI_DEV_CMD_GET_MAX_INBOUND_SIZE. ąÆąĄčĆąĮąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą▒čāč乥čĆą░. ąØąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. Value: u32* (čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░).
ADI_DEV_CMD_GET_MAX_OUTBOUND_SIZE. ąÆąĄčĆąĮąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą▒čāč乥čĆą░. ąØąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. Value: u32* (čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░).
ADI_DEV_CMD_FREQUENCY_CHANGE_PROLOG. ą×ą┐ąŠą▓ąĄčēą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CCLK/SCLK. ąĢčüą╗ąĖ čćą░čüč鹊čéą░ SCLK čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čćą░čüč鹊čéą░ ąĖąĘą╝ąĄąĮąĖčéčüčÅ, ąĖąĮą░č湥 ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą║ą░ą║-č鹊 ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī čüą▓ąŠčÄ ą░ą║čéąĖą▓ąĮąŠčüčéčī. ą×ą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ą░, čģąŠčéčÅ ą┐ąĄčĆą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąŠąČąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ąĖ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą║ąŠą┤ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ. ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ VisualDSP ą▓ąĄčĆčüąĖąĖ 5.0 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖą╝ąĖ. Value: ADI_DEV_FREQUENCIES* (ąĮąŠą▓čŗąĄ čćą░čüč鹊čéčŗ).
ADI_DEV_CMD_FREQUENCY_CHANGE_EPILOG. ą×ą┐ąŠą▓ąĄčēą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čćą░čüč鹊čéčŗ CCLK/SCLK. ąĢčüą╗ąĖ čćą░čüč鹊čéą░ SCLK čāą╝ąĄąĮčīčłąĖą╗ą░čüčī, čćč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ ą┐ąŠą┤ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čćą░čüč鹊čéčŗ, čćč鹊ą▒čŗ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠą│ ą║ą░ą║-č鹊 ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čüą▓ąŠčÄ ą░ą║čéąĖą▓ąĮąŠčüčéčī. ą×ą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ą░, čģąŠčéčÅ ą┐ąĄčĆą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąŠąČąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ąĖ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą║ąŠą┤ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ. ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ VisualDSP ą▓ąĄčĆčüąĖąĖ 5.0 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖą╝ąĖ. Value: ADI_DEV_FREQUENCIES* (ąĮąŠą▓čŗąĄ čćą░čüč鹊čéčŗ).
ąÜąŠą╝ą░ąĮą┤čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą┤ą░ą╗ąĄąĄ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ čüą░ą╝ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čāąĮąĖą║ą░ą╗čīąĮčŗ ą┤ą╗čÅ čüą╗čāąČą▒čŗ FSS. ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĮąĖąČąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ ą┤ą╗čÅ ą▓čüąĄčģ čéąĖą┐ąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü FSS, ąĖ čŹčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ čéčĆąĄą▒čāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╗čāąČą▒ąŠą╣ FSS.
ADI_FSS_CMD_GET_BACKGRND_XFER_SUPPORT. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé PID ą▓ąŠąĘą▓čĆą░čéąĖčéčī TRUE ąĖą╗ąĖ FALSE ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ. ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠčéą▓ąĄčéčā ąĮą░ ą▓ąŠą┐čĆąŠčü - ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗą╝ ąĮčāąČąĮą░ ą┐ąŠčüčé-ąŠą▒čĆą░ą▒ąŠčéą║ą░ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ - ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą¢ąĄą╗č鹊ą╣ ą║ąĮąĖą│ąĖ - ą┐ąĄčĆąĄą┤ ą▓ąŠąĘą▓čĆą░č鹊ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ FSD ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ FALSE. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą║ą░ąČąĄčé, ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ą╗ąĖ čäą░ą╣ą╗ąŠą▓čŗą╣ ą║čŹčł ą┤ą╗čÅ čäą░ą╣ą╗ąŠą▓, ąŠčéą║čĆčŗčéčŗčģ ąĮą░ ąĮąŠčüąĖč鹥ą╗ąĄ ą┤ą░ąĮąĮčŗčģ, čüą▓čÅąĘą░ąĮąĮąŠą╝ čü čŹčéąĖą╝ PID. Value: ą▓ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą║ą╗ąĖąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓ ąĮąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░.
ADI_FSS_CMD_GET_DATA_ELEMENT_WIDTH. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé PID ą▓ąŠąĘą▓čĆą░čéąĖčéčī čłąĖčĆąĖąĮčā (ą▓ ą▒ą░ą╣čéą░čģ) ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéą░ čłąĖčĆąĖąĮą░ ąŠą▒čŗčćąĮąŠ čĆą░ą▓ąĮą░ čüą░ą╝ąŠą╝čā ą╗čāčćčłąĄą╝čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ (ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠą╝čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╝čā) čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA. ąØą░ą┐čĆąĖą╝ąĄčĆ, ATA-ąĖąĮč鹥čĆč乥ą╣čü ą║čĆąĖčüčéą░ą╗ą╗ąŠą▓ ADSP-BF54x ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ 16-ą▒ąĖčéąĮčŗąĄ (2-ą▒ą░ą╣čéąĮčŗąĄ) ą▒čāč乥čĆčŗ DMA, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąĖąĮč鹥čĆč乥ą╣čü SD-CARD ADSP-BF54x ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ 32-ą▒ąĖčéąĮčŗąĄ (4-ą▒ą░ą╣čéąĮčŗąĄ) ą▒čāč乥čĆčŗ DMA. Value: ą▓ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą║ą╗ąĖąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓ ąĮąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░.
ADI_FSS_CMD_ACQUIRE_LOCK_SEMAPHORE. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé PID ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ Lock Semaphore, čćč鹊ą▒čŗ ą┤ą░čéčī ą▓čŗąĘčŗą▓ą░čÄčēąĄą╝čā ą╝ąŠą┤čāą╗čÄ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ čäčāąĮą║čåąĖčÅą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ PID. Value: NULL.
ADI_FSS_CMD_RELEASE_LOCK_SEMAPHORE. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé PID ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī Lock Semaphore, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_FSS_CMD_ACQUIRE_LOCK_SEMAPHORE. Value: NULL.
ADI_FSS_CMD_SET_CACHE_HEAP_ID. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé 菹║ąĘąĄą╝ą┐ą╗čÅčĆ PID ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāą║ą░ąĘą░ąĮąĮčŗą╣ ąĖąĮą┤ąĄą║čü ą║čāčćąĖ ą┤ą╗čÅ ą╗čÄą▒čŗčģ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅąĄą╝čŗčģ ą║čŹčłąĄą╣ ą┤ą░ąĮąĮčŗčģ. ąźąŠčéčÅ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčī ADI_FSS_RESULT_SUCCESS, ą┤ą░ąČąĄ ąĄčüą╗ąĖ čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ąśąĮą┤ąĄą║čü ą║čāčćąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čéą░ą║ąĖčģ ą║čŹčłąĄą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ -1, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒čēąĖą╣ ą║čŹčł čüą╗čāąČą▒čŗ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (FSS General Heap). Value: ąĖąĮą┤ąĄą║čü čéčĆąĄą▒čāąĄą╝ąŠą╣ ą║čāčćąĖ.
ADI_PID_CMD_GET_FIXED. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé PID ą▓ąĄčĆąĮčāčéčī TRUE ąĖą╗ąĖ FALSE, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąŠą│ąŠ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ - čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĖą╗ąĖ ąĖąĘą▓ą╗ąĄą║ą░ąĄą╝ąŠąĄ. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐čĆąĖą╝ąĄąĮąĖą╝ą░ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čéą░ą║ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čåąĄą╗ąĄą╣ č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖčÅ. Value: ą▓ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą║ą╗ąĖąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓ ąĮąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░.
ADI_PID_CMD_MEDIA_ACTIVATE. ąÉą║čéąĖą▓ąĖčĆčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÅ ąĄą│ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé ą▓ą║ą╗čÄčćą░čéčī ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čäą╗ą░ą│ąŠą▓ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ PORT MUX, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. Value: TRUE ą┤ą╗čÅ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĖčÅ, FALSE ą┤ą╗čÅ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ.
ADI_PID_CMD_POLL_MEDIA_CHANGE. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé PID ą┐čĆąŠą▓ąĄčĆąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ (media). ąĢčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé, čćč鹊 ąĮąŠčüąĖč鹥ą╗čī ą▒čŗą╗ ąĖąĘą▓ą╗ąĄč湥ąĮ, č鹊 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ callback čü čüąŠą▒čŗčéąĖąĄą╝ ADI_FSS_EVENT_MEDIA_REMOVED, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ ą▓ callback-čäčāąĮą║čåąĖčÄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ (ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą┤ą░ą╗ąĄąĄ, ą▓ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ callback-čäčāąĮą║čåąĖąĄą╣). ąĢčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗, čćč鹊 ąĮąŠčüąĖč鹥ą╗čī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čā IDENTIFY ąĖą╗ąĖ IDENTIFY PACKET (ąĖą╗ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čćč鹊 ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░), ąĖ ąĘą░č鹥ą╝ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_MEDIA_INSERTED ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ. Value: NULL.
ADI_PID_CMD_DETECT_VOLUMES. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé PID čĆą░čüą┐ąŠąĘąĮą░čéčī č鹊ą╝ą░ (volumes)/čĆą░ąĘą┤ąĄą╗čŗ (partitions), ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąĮą░ ąĮąŠčüąĖč鹥ą╗ąĄ ą┤ą░ąĮąĮčŗčģ (media). ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ č鹊ą╝ą░ ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_VOLUME_DETECTED čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ąĘąĮą░čćąĖą╝čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ č鹊ą╝ą░ ą▓ čéčĆąĄčéčīąĄą╝ ą░čĆą│čāą╝ąĄąĮč鹥 (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣). Value: NULL.
ADI_PID_CMD_SEND_LBA_REQUEST. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ą╗ąŠ/ąĘą░ą┐ąĖčüą░ą╗ąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ąĖąĘ/ą▓ ąĮą░čćą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čüąĄą║č鹊čĆą░ LBA. Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_LBA_REQUEST, čüąŠą┤ąĄčƹȹ░čēąĄą╣ čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ.
ADI_PID_CMD_ENABLE_DATAFLOW. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé PID ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čłą░ą│ąĖ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░/ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ { ADI_DEV_CMD_SET_DATAFLOW, (void*)TRUE } ąĮąĄ ą┤ąŠčüčéąĖą│ąĮąĄčé čćą░čüčéąĖ PDD ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA, ąĖą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ { ADI_DEV_CMD_SET_DATAFLOW, (void*)FALSE } ą▒čŗą╗ą░ ą┐čĆąĖąĮčÅčéą░ ą▓ ą┐čĆąŠą╝ąĄąČčāčéą║ąĄ, čćč鹊 ąĮąĄ čüčéčĆąŠą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ą░ąČąĄ ąĮąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╝, ą┐ąŠčüą║ąŠą╗čīą║čā ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ą╝ąŠą╝ąĄąĮčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░. Value: TRUE/FALSE.
ADI_PID_CMD_SET_DIRECT_CALLBACK. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü callback-čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░, ą▒ąĄąĘ ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĮąĖčÅ (ąĮąĄ č湥čĆąĄąĘ čüąĄčĆą▓ąĖčü DCB [5]) ą┐čĆąĖ čüąŠą▒čŗčéąĖčÅčģ čāčüčéą░ąĮąŠą▓ą║ąĖ/ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠą▒čŗčéąĖčÅčģ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą╝ą░. Value: ą┐čĆčÅą╝ąŠą╣ ą░ą┤čĆąĄčü callback-čäčāąĮą║čåąĖąĖ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą┐čéąĖč湥čüą║ąĖąĄ ąĮąŠčüąĖč鹥ą╗ąĖ:
ADI_PID_CMD_SET_VOLUME_PRIORITY. ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą┐čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą▓ąŠą┤čŗ, čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠčĆčÅą┤ą║ą░ ą┐čĆąĖąŠčĆąĖč鹥čéą░, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ą░ą║ąŠą╣ čéąĖą┐ č鹊ą╝ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ąŁčéąĖ čéąĖą┐čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ adi_fss.h ą┤ą╗čÅ Joliet 3, Joliet 2, Joliet 1 ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ č鹊ą╝ąŠą▓ ISO 9660. ąØąĄčüą║ąŠą╗čīą║ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü čéąĖą┐ąŠą╝, čāą║ą░ąĘą░ąĮąĮčŗą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╗čāčćą░ąĄčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ą¤ąŠčüą╗ąĄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą╝ąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆ PID ą▒čāą┤ąĄčé ą┐čŗčéą░čéčīčüčÅ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ ą▓čŗčüąŠą║ąŠą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą▓ čüą┐ąĖčüą║ąĄ, ąĖąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄčģąŠą┤ ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą┐čĆąĖąŠčĆąĖč鹥čéčā, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ, ą┐ąŠą║ą░ ąĮą░čģąŠą┤čÅčéčüčÅ čéąĖą┐čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī. ąÆ čüą╗čāčćą░ąĄ ąĮąĄčāą┤ą░čćąĖ ą▒čāą┤ąĄčé ą┐čĆąŠčüč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čüčéą░ąĮą┤ą░čĆčéą░ ISO9660 čü ąĖą╝ąĄąĮą░ą╝ąĖ čäą░ą╣ą╗ąŠą▓ 8.3. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ čéąĖą┐ č鹊ą╝ą░ čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ č鹊ą│ąŠ, ą║ą░ą║ąŠą╣ ąŠą┐čéąĖč湥čüą║ąĖą╣ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ. Value: ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĖč鹥ą╗čÅ ą┤ą╗čÅ čéąĖą┐ą░ č鹊ą╝ą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ ąĮą░čćą░ą╗ąŠ čüą┐ąĖčüą║ą░.
ADI_PID_CMD_GET_MAX_READ_SPEED. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī čćč鹥ąĮąĖčÅ ą┐čĆąĖą▓ąŠą┤ą░ ą▓ č鹥čĆą╝ąĖąĮą░čģ ą╝ąĮąŠąČąĖč鹥ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ 1x, 2x, ..., 32x. Value: ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ u32, ą│ą┤ąĄ ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ą▓ąŠąĘą▓čĆą░č鹥 čüąŠą┤ąĄčƹȹĖčéčüčÅ ą╝ąĮąŠąČąĖč鹥ą╗čī čüą║ąŠčĆąŠčüčéąĖ.
ADI_PID_CMD_SET_READ_SPEED. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé PID ą┐ąŠą┤čüčéčĆąŠąĖčéčī čüą║ąŠčĆąŠčüčéčī čćč鹥ąĮąĖčÅ ą┐čĆąĖą▓ąŠą┤ą░. Value: ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ u32, čüąŠą┤ąĄčƹȹ░čēą░čÅ ą╝ąĮąŠąČąĖč鹥ą╗čī ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ (1x, 2x, ..., 32x).
ADI_PID_CMD_GET_MAX_WRITE_SPEED. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ąĘą░ą┐ąĖčüąĖ ą┐čĆąĖą▓ąŠą┤ą░ ą▓ č鹥čĆą╝ąĖąĮą░čģ ą╝ąĮąŠąČąĖč鹥ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ 1x, 2x, ..., 32x. Value: ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ u32, ą│ą┤ąĄ ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ą▓ąŠąĘą▓čĆą░č鹥 čüąŠą┤ąĄčƹȹĖčéčüčÅ ą╝ąĮąŠąČąĖč鹥ą╗čī čüą║ąŠčĆąŠčüčéąĖ.
ADI_PID_CMD_SET_WRITE_SPEED. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé PID ą┐ąŠą┤čüčéčĆąŠąĖčéčī čüą║ąŠčĆąŠčüčéčī ąĘą░ą┐ąĖčüąĖ ą┐čĆąĖą▓ąŠą┤ą░. Value: ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ u32, čüąŠą┤ąĄčƹȹ░čēą░čÅ ą╝ąĮąŠąČąĖč鹥ą╗čī ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ (1x, 2x, ..., 32x).
ADI_PID_CDAUDIO_CMD_GET_DISK_INFO. ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠą▒čēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┤ąĖčüą║ąĄ. Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_PID_CDAUDIO_DISK_INFO, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ą▓ąŠąĘą▓čĆą░č鹥 ąĖąĘ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┤ąĖčüą║ąĄ.
ADI_PID_CDAUDIO_CMD_GET_TRACK_INFO. ąÜąŠą╝ą░ąĮą┤ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠčéą┤ąĄą╗čīąĮąŠą╝ čéčĆąĄą║ąĄ. Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_PID_CDAUDIO_TRACK_INFO, ą│ą┤ąĄ ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ą▓ąŠąĘą▓čĆą░č鹥 ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čéčĆąĄą║ąĄ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ čłąĖąĮąĄ ą┤ą░ąĮąĮčŗčģ:
ADI_PID_CMD_SET_NUMBER_DEVICES. ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ąĖčüą║ą░ (Parallel ATA), čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čåąĄą┐ąŠčćą║ąĄ, čü ą║ąŠč鹊čĆčŗą╝ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čŹč鹊čé 菹║ąĘąĄą╝ą┐ą╗čÅčĆ PID. Value: 1 ąĖą╗ąĖ 2.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ, ąĖ ąŠąĮąĖ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüąĄą╝ ą┤ą░ąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░:
ADI_PID_CMD_GET_GLOBAL_MEDIA_DEF. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ PID ą▓ąŠąĘą▓čĆą░čéąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ąŠčéąĮąŠčüčÅčēčāčÄčüčÅ ą║ ąŠą▒čēąĄą╣ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ ą┐čĆąĖą▓ąŠą┤ą░. Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_VOLUME_DEF, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮą░ ąŠą▒čēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ:
FileSystemType - ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
StartAddress - čüąĄą║č鹊čĆ (Sector, ąĘąĮą░č湥ąĮąĖąĄ LBA) ą┐ąĄčĆą▓ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čüąĄą║č鹊čĆą░ ąĮą░ ąĮąŠčüąĖč鹥ą╗ąĄ ą┤ą░ąĮąĮčŗčģ.
VolumeSize - ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ.
SectorSize - čĆą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ čüąĄą║č鹊čĆą░ ą▓ ą▒ą░ą╣čéą░čģ.
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąŠą│čāčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ PID. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé FSS, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü čåąĄą╗čīčÄ čĆą░ąĘą▒ąĖąĄąĮąĖčÅ ą┤ąĖčüą║ą░ ąĮą░ čĆą░ąĘą┤ąĄą╗čŗ (partitioning). ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ čŹčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą║ ą┐ą░čĆą░ą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ FSD ŌĆō PID.
ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░, ąŠčéąĮąŠčüčÅčēąĄą│ąŠčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā PID {pid-ident}.h čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
enum
{
{NS}_{IFACE}_CMD_START = ADI_PID_CUSTOM_CMD_START, /* (0x000AA000) */
{NS}_{IFACE}_CMD_ ,
{NS}_{IFACE}_CMD_ ,
{NS}_{IFACE}_CMD_ ,
};
[ąĪąŠą▒čŗčéąĖčÅ callback]
ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čüąŠą▒čŗčéąĖčÅ callback, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĄąĮ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ PID. ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ą┤ąĄą╗čÅčéčüčÅ ąĮą░ 2 čüąĄą║čåąĖąĖ. ą¤ąĄčĆą▓ą░čÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą╝ąĮąŠą│ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓. ąÆč鹊čĆą░čÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠą▒čŗčéąĖą╣ (event ID), čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ FSS. ąĪą╗čāąČą▒ą░ FSS ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé callback-čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čéčĆąĄą▒čāąĄą╝čŗąĄ čüąŠą▒čŗčéąĖčÅ. ąÆ čĆąĄąČąĖą╝ąĄ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID (ą▒ąĄąĘ čüą╗čāąČą▒čŗ FSS), čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čüąŠą▒čŗčéąĖą╣, ąŠą┐ąĖčüą░ąĮąĮčŗčģ ą▓ čŹčéąĖčģ ą┤ą▓čāčģ čüąĄą║čåąĖčÅčģ.
ąŻ callback-čäčāąĮą║čåąĖąĖ čéąĖą┐ ADI_DCB_CALLBACK_FN, ąĖ ąĄą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ 3 ą┐ą░čĆą░ą╝ąĄčéčĆą░:
ClientHandle. ąśčüą║ą╗čÄčćą░čÅ callback-ąĖ ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░, čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĖą╝ąĄąĄčé čéąĖą┐ void*, ąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ DeviceHandle (3-ą╣ ą░čĆą│čāą╝ąĄąĮčé, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ PID). ąöą╗čÅ callback-ąŠą▓ ą┐čĆčÅą╝ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą░ą┤čĆąĄčü čŹč鹊ą│ąŠ ą░čĆą│čāą╝ąĄąĮčéą░.
EventID. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ u32, ą║ąŠč鹊čĆąŠąĄ čüąŠą┤ąĄčƹȹĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠą▒čŗčéąĖčÅ (event ID, čüą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čüąŠą▒čŗčéąĖą╣).
Value. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĖą╝ąĄąĄčé čéąĖą┐ void*, ąĖ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮč鹥ą║čüčéą░, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čüąŠą▒čŗčéąĖčÅ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé EventID).
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ callback-ąŠą▓ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąŠ callback-čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ [3], čāą║ą░ąĘą░ąĮąĮąŠą╣ ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą░čĆą│čāą╝ąĄąĮčé DMCallback, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. ąØąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī ąŠčéą╗ąŠąČąĄąĮąĮčŗą╣ callback, ą┐ąŠčüą║ąŠą╗čīą║čā callback-čäčāąĮą║čåąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┤ąĄą╗ą░ąĄčé čŹč鹊, ąĄčüą╗ąĖ ą▓ adi_dev_Open() ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ ąŠč湥čĆąĄą┤ąĖ DCB. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ callback-ąŠą▓ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ FSS.
ąśčüą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ čÅą▓ą╗čÅčÄčéčüčÅ čüąŠą▒čŗčéąĖčÅ ADI_FSS_EVENT_MEDIA_INSERTED, ADI_FSS_EVENT_MEDIA_REMOVED ąĖ ADI_FSS_EVENT_VOLUME_DETECTED, ą│ą┤ąĄ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čüą╗čāąČą▒čŗ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (FSS) ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆčÅą╝čŗąĄ (ąĮąĄ ąŠčéą╗ąŠąČąĄąĮąĮčŗąĄ č湥čĆąĄąĘ čüąĄčĆą▓ąĖčü DCB) ą▓čŗąĘąŠą▓čŗ callback-čäčāąĮą║čåąĖą╣. ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ FSS ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PID_CMD_SET_DIRECT_CALLBACK. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ClientHandle ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗąĘčŗą▓ą░ąĄą╝čāčÄ callback-čäčāąĮą║čåąĖčÄ čŹč鹊 ą░ą┤čĆąĄčü ą░čĆą│čāą╝ąĄąĮčéą░ DeviceHandle.
ąöą╗čÅ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ PID (ą▒ąĄąĘ FSS), ą║ąŠą│ą┤ą░ ą║ąŠą╝ą░ąĮą┤ą░ ADI_PID_CMD_SET_DIRECT_CALLBACK ąŠą┐čāčēąĄąĮą░, ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒čŗčćąĮčŗą╣ ą╝ą░čĆčłčĆčāčé ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ąÆ čüąĄą║čåąĖčÅčģ ąĮąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠą▒čŗčéąĖą╣ (event ID), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ Value ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čŹčéąĖčģ event ID.
ą×ą▒čēąĖąĄ čüąŠą▒čŗčéąĖčÅ (Common Events). ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą╝ąĮąŠą│ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓. ąÆ čüą┐ąĖčüą║ąĄ ąĮąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓čüąĄ event ID ąŠą▒čēąĖčģ čüąŠą▒čŗčéąĖą╣, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID.
ADI_DEV_EVENT_BUFFER_PROCESSED. ą×ą┐ąŠą▓ąĄčēą░ąĄčé callback-čäčāąĮą║čåąĖčÄ, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą▒čāč乥čĆ čåąĄą┐ąŠčćą║ąĖ (chained buffer) ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (sequential I/O buffer). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ č鹊ą╝, čćč鹊 ą▓ąĄčüčī ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ąĄčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčā ą▒čŗą╗ąŠ čāą║ą░ąĘą░ąĮąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą▓čŗąĘąŠą▓ callback ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░. Value: čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ CallbackParameter, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ ą▒čāč乥čĆąĄ, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ čäčāąĮą║čåąĖąĖ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write().
ąĪąŠą▒čŗčéąĖčÅ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ PID (Device Driver Specific Events). ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ event IDs čāąĮąĖą║ą░ą╗čīąĮčŗ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
ADI_FSS_EVENT_MEDIA_INSERTED. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CMD_POLL_MEDIA_CHANGE ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ (media insert). Value: ą░ą┤čĆąĄčü ą╝ąĄčüčéą░ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (čÅč湥ą╣ą║ą░ ą┐ą░ą╝čÅčéąĖ). ąÜąŠą│ą┤ą░ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé čŹč鹊čé callback, č鹊 ąĘą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Number), ąĖ 0 ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ (čüą╝. ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CMD_SET_NUMBER_DEVICES). ą¤čĆąĖ ą▓ąŠąĘą▓čĆą░č鹥 ąĖąĘ callback ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ čĆąĄąĘčāą╗čīčéą░čéą░. ąĢčüą╗ąĖ ą║ąŠą┤ čĆąĄąĘčāą╗čīčéą░čéą░ ADI_FSS_RESULT_SUCCESS, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ PID ą╝ąŠąČąĄčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ (media) ą║ą░ą║ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčēąĖą╣ ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ čāčćč鹥ąĮąĮčŗą╣ čüą╗čāąČą▒ąŠą╣ FSS.
ADI_FSS_EVENT_MEDIA_REMOVED. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CMD_POLL_MEDIA_CHANGE ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ (media remove). Value: ą░ą┤čĆąĄčü ą╝ąĄčüčéą░ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (čÅč湥ą╣ą║ą░ ą┐ą░ą╝čÅčéąĖ). ąÜąŠą│ą┤ą░ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé čŹč鹊čé callback, č鹊 ąĘą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Number), ąĖ 0 ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ (čüą╝. ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CMD_SET_NUMBER_DEVICES). ą¤čĆąĖ ą▓ąŠąĘą▓čĆą░č鹥 ąĖąĘ callback, čŹč鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
ADI_FSS_EVENT_VOLUME_DETECTED. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CMD_DETECT_VOLUMES ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖčüą┐čĆą░ą▓ąĮąŠą│ąŠ č鹊ą╝ą░/čĆą░ąĘą┤ąĄą╗ą░ (volume/partition). Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_VOLUME_DEF, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĄą╣ č鹊ą╝:
FileSystemType - ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ adi_fss.h (čüą╝. ą┐ąŠą╝ąĄčéą║čā "Enumerator for known File System types", čé. ąĄ. "ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĖąĘą▓ąĄčüčéąĮčŗčģ čéąĖą┐ąŠą▓ čäą░ą╣ą╗ąŠą▓čŗčģ čüąĖčüč鹥ą╝"). ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [2], ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ FSS.
StartAddress - čüąĄą║č鹊čĆ (Sector, ąĘąĮą░č湥ąĮąĖąĄ LBA) ą┐ąĄčĆą▓ąŠą│ąŠ čüąĄą║č鹊čĆą░ č鹊ą╝ą░.
VolumeSize - čĆą░ąĘą╝ąĄčĆ č鹊ą╝ą░ ą▓ čüąĄą║č鹊čĆą░čģ.
SectorSize - čĆą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ čüąĄą║č鹊čĆą░ č鹊ą╝ą░ ą▓ ą▒ą░ą╣čéą░čģ.
DeviceNumber - ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓. ąŚą┤ąĄčüčī ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 0, ąĄčüą╗ąĖ čåąĄą┐ąŠčćą║ą░ čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ą░.
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą┤ąŠą╗ąČąĮą░ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčīčüčÅ čüą╗čāąČą▒ąŠą╣ FSS (ąĖą╗ąĖ callback-ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ ąĮąĄ FSS čĆąĄąČąĖą╝ąĄ) ą║ą░ą║ volatile, ąĖ ą║ą░ą║ čéą░ą║ąŠą▓ą░čÅ ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čŖčÅą▓ą╗ąĄąĮą░ ą▓ čüč鹥ą║ąĄ ą▓ąĮčāčéčĆąĖ PID. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ąĮčāąČąĮąŠ ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą▓ FSS (ąĖą╗ąĖ ą▓ callback-čäčāąĮą║čåąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ) ą┐ąĄčĆąĄą┤ ą▓ąŠąĘą▓čĆą░č鹊ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ PID, ąĄčüą╗ąĖ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ.
ADI_PID_EVENT_DEVICE_INTERRUPT. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č鹊 čŹč鹊 čüąŠą▒čŗčéąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┤ą░ąĮąŠ ą┐čĆąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ DMA, ADI_DEV_EVENT_BUFFER_PROCESSED. Value: ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ą▒čāč乥čĆą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü čŹčéąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄ, ąĮą░čģąŠą┤čÅčēąĄąĄčüčÅ ą▓ ą┐ąŠą╗ąĄ pBuffer čüčéčĆčāą║čéčāčĆčŗ ąĘą░ą┐čĆąŠčüą░ LBA, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü čüąŠą▒čŗčéąĖąĄą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ.
[ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░]
ąÆčüąĄ API-čäčāąĮą║čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąŠąĘą▓čĆą░čēą░čÄčé ą║ąŠą┤ čüčéą░čéčāčüą░. ąŚąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą▒čŗą╗ ą╗ąĖ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ čāčüą┐ąĄčłąĮčŗą╝, ą╗ąĖą▒ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ ą┐čĆąŠąĖąĘąŠčłąĄą┤čłčāčÄ ąŠčłąĖą▒ą║čā. ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, ą║ąŠč鹊čĆčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą║ą╗ąĖąĄąĮčéčā. ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ADI_DEV_RESULT_SUCCESS ąĖą╗ąĖ ADI_FSS_RESULT_SUCCESS ąŠąĘąĮą░čćą░ąĄčé čāčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╗čÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā, ąĖą╗ąĖ ą║ą░ą║ąŠą╣-č鹊 ą┤čĆčāą│ąŠą╣ ąĖąĮč乊čĆą╝ą░čéąĖą▓ąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé. ąŚąĮą░č湥ąĮąĖčÅ ADI_DEV_RESULT_SUCCESS ąĖ ADI_FSS_RESULT_SUCCESS ąŠą▒ą░ čĆą░ą▓ąĮčŗ 0. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ąĮčāą╗ąĄą▓čŗąĄ.
ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ą┤ąĄą╗čÅčéčüčÅ ąĮą░ 2 čüąĄą║čåąĖąĖ. ą¤ąĄčĆą▓ą░čÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, ą║ąŠč鹊čĆčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą╝ąĮąŠą│ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓. ąÆč鹊čĆą░čÅ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. ąÜą╗ąĖąĄąĮčé ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░, ąŠą┐ąĖčüą░ąĮąĮčŗčģ ą▓ čŹčéąĖčģ ą┤ą▓čāčģ čüąĄą║čåąĖčÅčģ.
ą×ą▒čŗčćąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ADI_DEV_RESULT_SUCCESS, ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ADI_DEV_RESULT_SUCCESS. ąØą░ą┐čĆąĖą╝ąĄčĆ:
if (adi_dev_Xxxx(...) == ADI_DEV_RESULT_SUCCESS)
{
// ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░, čāčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ
...
}
else
{
// ąŚą┤ąĄčüčī ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ą║ąĖ
...
}
ą×ą▒čēąĖąĄ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ (Common Return Codes). ąŁčéąĖ ą║ąŠą┤čŗ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą╝ąĮąŠą│ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓. ąĪą┐ąĖčüąŠą║ ąĮąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓čüąĄ ąŠą▒čēąĖąĄ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID.
ADI_DEV_RESULT_SUCCESS. ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ.
ADI_DEV_RESULT_NOT_SUPPORTED. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
ADI_DEV_RESULT_DEVICE_IN_USE. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ADI_DEV_RESULT_NO_MEMORY. ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ.
ADI_DEV_RESULT_BAD_DEVICE_NUMBER. ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░.
ADI_DEV_RESULT_DIRECTION_NOT_SUPPORTED. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ.
ADI_DEV_RESULT_BAD_DEVICE_HANDLE. ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ADI_DEV_RESULT_BAD_MANAGER_HANDLE. ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ADI_DEV_RESULT_BAD_PDD_HANDLE. ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ADI_DEV_RESULT_INVALID_SEQUENCE. ąŚą░ą┐čĆąŠčłąĄąĮąĮąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čü ą┤čĆčāą│ąĖą╝ąĖ ą┤ąĄą╣čüčéą▓ąĖčÅą╝ąĖ.
ADI_DEV_RESULT_ATTEMPTED_READ_ON_OUTBOUND_DEVICE. ąÜą╗ąĖąĄąĮčé ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą▓čģąŠą┤čÅčēąĖą╣ ą▒čāč乥čĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąŠčéą║čĆčŗč鹊ą│ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ čéčĆą░čäąĖą║ą░.
ADI_DEV_RESULT_ATTEMPTED_WRITE_ON_INBOUND_DEVICE. ąÜą╗ąĖąĄąĮčé ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĖčüčģąŠą┤čÅčēąĖą╣ ą▒čāč乥čĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąŠčéą║čĆčŗč鹊ą│ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ čéčĆą░čäąĖą║ą░.
ADI_DEV_RESULT_DATAFLOW_UNDEFINED. ą¤ąŠą║ą░ ąĮąĄ ą▒čŗą╗ ąĘą░ą┤ą░ąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ.
ADI_DEV_RESULT_DATAFLOW_INCOMPATIBLE. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╝ ą┤ąĄą╣čüčéą▓ąĖąĄą╝.
ADI_DEV_RESULT_BUFFER_TYPE_INCOMPATIBLE. ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čéąĖą┐ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░.
ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ FSS. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ < services/fss/adi_fss.h >, ąĖ ąŠąĮąĖ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ąŠ ą▓čüąĄą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ PID:
ADI_FSS_RESULT_SUCCESS. ą×ą▒čēąĄąĄ čāčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ.
ADI_FSS_RESULT_FAILED. ą×ą▒čēą░čÅ ąŠčłąĖą▒ą║ą░.
ADI_FSS_RESULT_NO_MEDIA. ąØąĄ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ, ąĖą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā.
ADI_FSS_RESULT_NO_MEMORY. ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░. ą×ą▒čŗčćąĮąŠ čŹč鹊čé ą║ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ _adi_fss_malloc().
ADI_FSS_RESULT_MEDIA_CHANGED. ąśąĘą╝ąĄąĮąĖą╗čüčÅ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ (media changed).
ADI_FSS_RESULT_DEVICE_IS_LOCKED. ąöčĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą│ąŠčüčÅ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
ADI_FSS_RESULT_NOT_SUPPORTED. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID.
[ąĪčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ]
ąóąŠčćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆ (Device Driver Entry Points, ADI_DEV_PDD_ENTRY_POINT). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ąŠą▒čēą░čÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ADI Device Driver, čü čåąĄą╗čīčÄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ą╝ąŠą┤čāą╗ąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID (čäą░ą╣ą╗ {pid-ident}.c), ąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąŠ ą║ą░ą║ ą▓ąĮąĄčłąĮčÅčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ (extern) ą▓ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID (čäą░ą╣ą╗ {pid-ident}.h), ą│ą┤ąĄ ąĮą░ą╗ąĖčćąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĘą░čēąĖčēąĄąĮąŠ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čüą╗ąĄą┤čāčÄčēąĖčģ čüčéčĆąŠą║:
ŌĆó ąÆ ą╝ąŠą┤čāą╗ąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐ąĄčĆąĄą┤ ąŠą┐ąĄčĆą░č鹊čĆąŠą╝ #include ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ą░ą║čĆąŠčü __{PID-IDENT}_C__.
ŌĆó ąÆ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮą░ ą┤ąĄą║ą╗ą░čĆą░čåąĖčÅ extern:
#if !defined(__{PID-IDENT}_C__)
extern ADI_DEV_PDD_ENTRY_POINT {PID_IDENT}_EntryPoint;
...
#endif
ą¤ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ (Command-Value Pairs, ADI_DEV_CMD_VALUE_PAIR). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ąŠą▒čēą░čÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ADI Device Driver, ąĖ čŹč鹊 ąĮčāąČąĮąŠ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąöčĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čüąĄ 3 ą╝ąĄč鹊ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
adi_dev_control( ..., ADI_DEV_CMD_TABLE, (void*)< ą░ą┤čĆąĄčü_čéą░ą▒ą╗ąĖčåčŗ_ą┐ą░čĆ_ą║ąŠą╝ą░ąĮą┤ą░_ąĘąĮą░č湥ąĮąĖąĄ > );
adi_dev_control( ..., ADI_DEV_CMD_PAIR, (void*) < ą░ą┤čĆąĄčü_ąŠą┤ąĮąŠą╣_ą┐ą░čĆčŗ_ą║ąŠą╝ą░ąĮą┤ą░_ąĘąĮą░č湥ąĮąĖąĄ > );
adi_dev_control( ..., < ą║ąŠą╝ą░ąĮą┤ą░ >, (void*)< čüą▓čÅąĘą░ąĮąĮąŠąĄ_čü_ą║ąŠą╝ą░ąĮą┤ąŠą╣_ąĘąĮą░č湥ąĮąĖąĄ > );
ąóą░ą▒ą╗ąĖčåą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID (čäą░ą╣ą╗ {pid-ident}.h), ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮąŠ ąŠčé ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĖ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą╝ąŠą┤čāą╗ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĄčüą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą╝ą░ą║čĆąŠčü _{PID-IDENT}_DEFAULT_DEF_:
#if !defined(__{PID-IDENT}_C__)
...
#if defined(_{PID-IDENT}_DEFAULT_DEF_)
static ADI_DEV_CMD_VALUE_PAIR {PID-IDENT}_ConfigurationTable[] = { ... };
...
#endif
...
#endif
ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Definition Structure, ADI_FSS_DEVICE_DEF). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮčüčéčĆčāą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ FSS, ą║ą░ą║ ąŠčéą║čĆčŗčéčī ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ PID. ąĢčæ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠ čüčāčēąĄčüčéą▓čā čŹč鹊 č鹊čé ąČąĄ ąŠą▒čŖąĄą╝ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą║ą░ą║ ą░čĆą│čāą╝ąĄąĮčéčŗ ą▓čŗąĘąŠą▓ą░ adi_dev_Open(). ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
u32 DeviceNumber;
ADI_DEV_PDD_ENTRY_POINT *pEntryPoint;
ADI_DEV_CMD_VALUE_PAIR *pConfigTable;
void *pCriticalRegionData;
ADI_DEV_DIRECTION Direction;
ADI_DEV_DEVICE_HANDLE DeviceHandle;
ADI_FSS_VOLUME_IDENT DefaultMountPoint;
} ADI_FSS_DEVICE_DEF;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ:
| DeviceNumber |
ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čĆą░ą▓ąĮąŠ ą░čĆą│čāą╝ąĄąĮčéčā DeviceNumber, ą║ąŠč鹊čĆčŗą╣ ąĮčāąČąĄąĮ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ adi_dev_Open(). ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ 0. |
| pEntryPoint |
ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĮąŠčćą║čā ą▓čģąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čüčÄą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č鹊čé ąČąĄ ą░čĆą│čāą╝ąĄąĮčé, ą║ąŠč鹊čĆčŗą╣ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą▓ čäčāąĮą║čåąĖčÄ adi_dev_Open(). ąöą╗čÅ PID čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮąŠ ąĮą░ &{PID_IDENT}_EntryPoint. |
| pConfigTable |
ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéą░ą▒ą╗ąĖčåčā ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮąŠ ąĮą░ {PID_IDENT}_ConfigurationTable. |
| pCriticalRegionData |
ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą░čĆą│čāą╝ąĄąĮčé, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ ąĪąĖčüč鹥ą╝ąĮčŗą╝ ąĪą╗čāąČą▒ą░ą╝ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ adi_int_EnterCriticalRegion(). ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čŹčéą░ čäąĖčćą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NULL. |
| Direction |
ąŁč鹊 ą░čĆą│čāą╝ąĄąĮčé ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, čéčĆąĄą▒čāąĄą╝čŗą╣ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ adi_dev_Open(). ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ ADI_DEV_DIRECTION_BIDIRECTIONAL. |
| DeviceHandle |
ąŁč鹊 čÅč湥ą╣ą║ą░ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čģąĄąĮą┤ą╗ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąĖąĘ ą▓čŗąĘąŠą▓ą░ adi_dev_Open(). ą¤ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ NULL. |
| DefaultMountPoint |
ąæčāą║ą▓ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ąĖčüą║ą░ ą┤ą╗čÅ č鹊ą╝ąŠą▓, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąŁč鹊 ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čāčüčéčĆąŠą╣čüčéą▓ą░ čü ąĖąĘą▓ą╗ąĄą║ą░ąĄą╝čŗą╝ ąĮąŠčüąĖč鹥ą╗ąĄą╝, čćč鹊ą▒čŗ ą▒čāą║ą▓ą░ ą┤ąĖčüą║ą░ čüąŠčģčĆą░ąĮčÅą╗ą░čüčī ą┐čĆąĖ ąĘą░ą╝ąĄąĮąĄ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ. |
ąśąĮčüčéą░ąĮčåąĖą░čåąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID (čäą░ą╣ą╗ {pid-ident}.h), ąĘą░čēąĖčēą░ąĄčéčüčÅ ąŠčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ąĖ ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą╝ąŠą┤čāą╗ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĄčüą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą╝ą░ą║čĆąŠčü _{PID-IDENT}_DEFAULT_DEF_:
#if !defined(__{PID-IDENT}_C__)
...
#if defined(_{PID-IDENT}_DEFAULT_DEF_)
static ADI_FSS_DEVICE_DEF {PID-IDENT}_Def = { ... };
...
#endif
...
#endif
ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ č鹊ą╝ą░ (Volume Definition Structure, ADI_FSS_VOLUME_DEF). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ PID ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü FSS, ą║ąŠą│ą┤ą░ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ č鹊ą╝ ąĖą╗ąĖ čĆą░ąĘą┤ąĄą╗ ą┤ąĖčüą║ą░. ąÉą┤čĆąĄčü ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ąĖąĮčüčéą░ąĮčåąĖą░čåąĖąĖ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé callback-čäčāąĮą║čåąĖąĖ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ FSS ą▓ą╝ąĄčüč鹥 čü čüąŠą▒čŗčéąĖąĄą╝ ADI_FSS_EVENT_VOLUME_DETECTED. ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
u32 FileSystemType;
u32 StartAddress;
u32 VolumeSize;
u32 SectorSize;
u32 DeviceNumber;
} ADI_FSS_VOLUME_DEF;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| FileSystemType |
ąŻąĮąĖą║ą░ą╗čīąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ čéąĖą┐ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ. ąöąŠą┐čāčüčéąĖą╝čŗąĄ čéąĖą┐čŗ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą░ąĮąŠąĮąĖą╝ąĮąŠą╝ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ FSS (ADI_FSS_FSD_TYPE_CDDATA_MODE1). |
| StartAddress |
ąØą░čćą░ą╗čīąĮčŗą╣ čüąĄą║č鹊čĆ č鹊ą╝ą░/čĆą░ąĘą┤ąĄą╗ą░ (volume/partition) ą▓ č乊čĆą╝ą░č鹥 LBA. |
| VolumeSize |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓, čüąŠą┤ąĄčƹȹ░čēąĖčģčüčÅ ą▓ č鹊ą╝ąĄ/čĆą░ąĘą┤ąĄą╗ąĄ. |
| SectorSize |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čüąĄą║č鹊čĆąĄ. |
| DeviceNumber |
ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ Parallel ATA ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī 2 čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┤ąĮąŠą╣ čåąĄą┐ąŠčćą║ąĄ: Master (ą│ą┤ąĄ DeviceNumber=0) ąĖ Slave (DeviceNumber=1). ąĢčüą╗ąĖ čŹč鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ PID, č鹊 čŹč鹊ą╝čā ą┐ąŠą╗čÄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĖčüą▓ąŠąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 0. |
FSS ą▒čāą┤ąĄčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī čŹčéčā čüčéčĆčāą║čéčāčĆčā ą║ą░ą║ volatile, ąĖ ą▒čāą┤ąĄčé ą┤ąĄą╗ą░čéčī ą║ąŠą┐ąĖčÄ ąĄčæ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ.
ąŚą░ą┐čĆąŠčü LBA (LBA Request, ADI_FSS_LBA_REQUEST). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐čĆąŠčüą░ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüąĄą║č鹊čĆąŠą▓, čćąĖčéą░ąĄą╝čŗčģ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą▓ ąĮąĄą│ąŠ). ąÉą┤čĆąĄčü ąĖąĮčüčéą░ąĮčåąĖą░čåąĖąĖ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┤čĆą░ą╣ą▓ąĄčĆčā PID ą╗ąĖą▒ąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PID_CMD_SEND_LBA_READ_REQUEST, ą╗ąĖą▒ąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PID_CMD_SEND_LBA_WRITE_REQUEST ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ PID. ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct ADI_FSS_LBA_REQUEST
{
u32 SectorCount;
u32 StartSector;
u32 DeviceNumber;
u32 ReadFlag;
ADI_FSS_SUPER_BUFFER *pBuffer;
} ADI_FSS_LBA_REQUEST;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| SectorCount |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╝ ą▒ą╗ąŠą║ąĄ ą┤ą░ąĮąĮčŗčģ. |
| StartSector |
ąØą░čćą░ą╗čīąĮčŗą╣ čüąĄą║č鹊čĆ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą▓ č乊čĆą╝ą░č鹥 LBA. |
| DeviceNumber |
ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąŁč鹊 ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĄčüą╗ąĖ PID ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čåąĄą┐ąŠčćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓. |
| ReadFlag |
ążą╗ą░ą│, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣, čćč鹊 ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗčģ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 1. ąĢčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 0. |
| pBuffer |
ąÉą┤čĆąĄčü čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░ ADI_FSS_SUPER_BUFFER. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹčéąĖčģ čüčéčĆčāą║čéčāčĆ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┐čéąĖč湥čüą║ąĖą╝ ą┐čĆąĖą▓ąŠą┤ą░ą╝.
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮą░čÅ čüčéčĆčāą║čéčāčĆą░ ą░čāą┤ąĖąŠą┤ąĖčüą║ą░ (CD AUDIO Disk Information Structure, ADI_FSS_CDAUDIO_DISK_INFO). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ CD AUDIO disk čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā FSD ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CDAUDIO_CMD_GET_DISK_INFO. ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
u32 DeviceNumber;
u32 Tracks;
} ADI_FSS_CDAUDIO_DISK_INFO;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| DeviceNumber |
ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąŁč鹊 ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĄčüą╗ąĖ PID ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čåąĄą┐ąŠčćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓. |
| Tracks |
ąöčĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊 ą┐ąŠą╗ąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čéčĆąĄą║ąŠą▓, ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ąĮą░ ą┤ąĖčüą║ąĄ audio CD. |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čéčĆąĄą║ąĄ (CD AUDIO Track Information Structure, ADI_FSS_CDAUDIO_TRACK_INFO). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ą░čāą┤ąĖąŠčéčĆąĄą║ąĄ (CD AUDIO track) čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā FSD ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CDAUDIO_CMD_GET_TRACK_INFO. ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
u32 DeviceNumber;
u32 Index;
u32 Address;
u32 Size;
} ADI_FSS_CDAUDIO_TRACK_INFO;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| DeviceNumber |
ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąŁč鹊 ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĄčüą╗ąĖ PID ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čåąĄą┐ąŠčćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓. |
| Index |
ąśąĮą┤ąĄą║čü čéčĆąĄą║ą░ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 1 ą┤ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čéčĆąĄą║č鹊ą▓, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_FSS_CDAUDIO_DISK_INFO. ąŁč鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ FSD ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ. |
| Address |
ąØą░čćą░ą╗čīąĮą░čÅ č鹊čćą║ą░ čéčĆąĄą║ą░ ą▓ č乊čĆą╝ą░č鹥 čüąĄą║č鹊čĆą░ LBA. |
| Size |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ą▓ čéčĆąĄą║ąĄ. |
ąóąĄą║čüč鹊ą▓ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą░čāą┤ąĖąŠą┤ąĖčüą║ą░ (CD AUDIO CDTEXT Information structure, ADI_FSS_CDAUDIO_CD_TEXT). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą╣ č鹥ą║čüč鹊ą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (raw CDTEXT) čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā FSD ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_PID_CDAUDIO_CMD_GET_CD_TEXT. ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ čüą╗čāąČą▒čŗ FSS (čäą░ą╣ą╗ adi_fss.h) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
u32 DeviceNumber;
u32 Size;
u32 Read;
u8 *pData;
} ADI_FSS_CDAUDIO_CD_TEXT;
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| DeviceNumber |
ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąŁč鹊 ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĄčüą╗ąĖ PID ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čåąĄą┐ąŠčćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓. |
| Size |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čü ą┤ąĖčüą║ą░ CD. |
| Read |
ąöčĆą░ą╣ą▓ąĄčĆ PID čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čćąĖčéą░ąĄą╝čŗčģ ą▒ą░ą╣čé. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ąĘąĮą░č湥ąĮąĖčÄ, čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą▓ ą┐ąŠą╗ąĄ Size. |
| pData |
ąÆ čŹč鹊čé ą▒čāč乥čĆ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ CDTEXT. |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_1D_BUFFER ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąĪ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čéąĖą┐ ą▒čāč乥čĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░: ą┐čĆąŠčüč鹊ą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ ADI_DEV_1D_BUFFER (ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čŹč鹊ą│ąŠ ąĖ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓ ą▒čāč乥čĆą░ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ "System Services and Device Driver Manual" [6]). ąÜąŠą│ą┤ą░ čüčéčĆčāą║čéčāčĆą░ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆčā PID ą▓čŗąĘąŠą▓ąŠą╝ adi_dev_Read ąĖą╗ąĖ adi_dev_Write, č鹊 ąĄčæ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ PID, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ą░ą║ąĄč鹊ą▓ SCSI ąĖ čé. ą┐., čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąÆ čŹč鹊ą╝ ą║ąŠąĮč鹥ą║čüčéą░ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖą╝ąĄčÄčé čüą╗ąĄą┤čāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ:
| Data |
ąÉą┤čĆąĄčü ą▒čāč乥čĆą░ ą┤ą╗čÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ/ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ. ąĢą│ąŠ čĆą░ąĘą╝ąĄčĆ ą┐ąŠą┤čĆą░ąĘčāąĄą╝ą▓ą░ąĄčéčüčÅ čĆą░ą▓ąĮčŗą╝ ElementCount*ElementWidth. |
| ElementCount |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. |
| ElementWidth |
ąĀą░ąĘą╝ąĄčĆ ą▓ ą▒ą░ą╣čéą░čģ ą║ą░ąČą┤ąŠą│ąŠ čüą╗ąŠą▓ą░. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čéą░ą║ąĖą╝ ąČąĄ, ą║ą░ą║ ą▒čŗą╗ąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ ąŠčéą▓ąĄč鹥 ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_FSS_CMD_GET_DATA_ELEMENT_WIDTH. |
| CallbackParameter |
ąÉą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ADI_DEV_1D_BUFFER. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ą▓ callback-čäčāąĮą║čåąĖčÄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. |
| pAdditionalInfo |
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. |
| ProcessedElementCount |
ąŁč鹊 ą┐ąŠą╗ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ, ą╗ąĖą▒ąŠ ą▓ čäčāąĮą║čåąĖąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą╗ąĖą▒ąŠ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ ąĖąĘ callback-čäčāąĮą║čåąĖąĖ FSS. |
| ProcessedFlag |
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. |
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╝. ą▓ čüąĄą║čåąĖąĖ, ą┐ąŠčüą▓čÅčēąĄąĮąĮąŠą╣ callback-čäčāąĮą║čåąĖčÅą╝.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_SUPER_BUFFER. ą¤ąŠą║ą░ ą▓čŗąĘąŠą▓čŗ adi_dev_Read/adi_dev_Write ą┐ąĄčĆąĄą┤ą░čÄčé ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_BUFFER ą▓ čĆą░ą╝ą║ą░čģ čüą╗čāąČą▒čŗ FSS, čŹč鹊čé ą░ą┤čĆąĄčü ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ą░ą║ ąĮą░ čüčéčĆčāą║čéčāčĆčā ADI_DEV_BUFFER, čéą░ą║ ąĖ ąĮą░ ąŠą▒ąĄčĆčéčŗą▓ą░čÄčēčāčÄ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ ADI_FSS_SUPER_BUFFER. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĖą╝ąĄąĄčé čüčéčĆčāą║čéčāčĆčā ADI_DEV_BUFFERą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąŠą╗čÅ, ąĖ čüąŠą┤ąĄčƹȹĖčé ą┤čĆčāą│čāčÄ ą▓ą░ąČąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, čéčĆąĄą▒čāąĄą╝čāčÄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā ą┤čĆčāą│ąĖą╝ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ą░ FSS. ąŁč鹊čé "čüčāą┐ąĄčĆą▒čāč乥čĆ" (Super Buffer, ADI_FSS_SUPER_BUFFER) ąĖą╝ąĄąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ:
| Buffer |
ąĪčéčĆčāą║čéčāčĆą░ ADI_DEV_BUFFER, čéčĆąĄą▒čāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĮąĄ ą┐ąŠą╗ąĄ čāą║ą░ąĘą░č鹥ą╗čÅ. |
| pBlock |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╝ ą║čŹčłąĄ FSS. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ NULL. |
| LastinProcessFlag |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╝ ą║čŹčłąĄ FSS. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ FALSE. |
| LBARequest |
ąĪčéčĆčāą║čéčāčĆą░ ADI_FSS_LBA_REQUEST ą┤ą╗čÅ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░. ąĢčüą╗ąĖ ą▒čāč乥čĆ č乊čĆą╝ąĖčĆčāąĄčé čćą░čüčéčī čåąĄą┐ąŠčćą║ąĖ ąĖ ąĘąĮą░č湥ąĮąĖąĄ SectorCount čĆą░ą▓ąĮąŠ 0, č鹊 ąĘą░ą┐čĆąŠčü LBA ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░ čéą░ą║ąČąĄ ą┐ąŠą║čĆčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗčģ ąĖ ą▓ čŹč鹊ą╝ ą┐ąŠą┤ą▒čāč乥čĆąĄ. |
| SemaphoreHandle |
ąźąĄąĮą┤ą╗ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąĄą╝ą░č乊čĆ, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü PID. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čć ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĮą░čĆčāąČąĖ, čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. |
| pFileDesc |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╝ ą║čŹčłąĄ FSS. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ NULL. |
| FSDCallbackFunction |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ FSD. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ NULL. |
| FSDCallbackHandle |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ FSD. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID. ąöą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ NULL. |
| PIDCallbackFunction |
ąÉą┤čĆąĄčü čäčāąĮą║čåąĖąĖ čéąĖą┐ą░ ADI_DCB_CALLBACK_FN, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čüą╗čāąČą▒ąŠą╣ FSS ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖą╣ ADI_DEV_EVENT_BUFFER_PROCESSED ąĖ ADI_PID_EVENT_DEVICE_INTERRUPT. ą¤čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ADI_PID_CMD_SEND_LBA_REQUEST ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ pBuffer ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĘą░ą┐čĆąŠčüą░ LBA ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čüčāą┐ąĄčĆą▒čāč乥čĆčā, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. |
| PIDCallbackHandle |
ąÉą┤čĆąĄčü 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ PID. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ą░ąĮąĮčŗąĄ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ čüąĄą║čåąĖąĖ PDD (Physical Device Driver, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░) ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čŹč鹊 ąĮąĄ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĮąĄ DeviceHandle). ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ADI_PID_CMD_SEND_LBA_REQUEST ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ pBuffer ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĘą░ą┐čĆąŠčüą░ LBA, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čüčāą┐ąĄčĆą▒čāč乥čĆčā ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐ąĄčĆąĄą┤ą░čć ą┤čĆą░ą╣ą▓ąĄčĆą░ PID. |
[ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ PID]
ąĪą╗čāąČą▒ą░ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (File System Service, FSS) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║čĆąŠąĄčé ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ PID ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖą╣ adi_dev_Open() ąĖ adi_dev_Control() ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą▓čÅąĘą░ąĮąĮčŗą╝ čüą┐ąĖčüą║ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ (Devices Linked list).
ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ PID ą▓ą╝ąĄčüč鹥 čü FSS ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 čüčéčĆčāą║čéčāčĆčā ADI_FSS_DEVICE_DEF ąĖ ą┐čĆąĖčüą▓ąŠą╣č鹥 ąĄčæ ą┐ąŠą╗čÄ pEntryPoint ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ (ADI_DEV_PDD_ENTRY_POINT), ąĖ ą┐čĆąĖčüą▓ąŠą╣č鹥 ą┐ąŠą╗čÄ pConfigTable ą░ą┤čĆąĄčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╣ čéą░ą▒ą╗ąĖčåčŗ, čüąŠą┤ąĄčƹȹ░čēąĄą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ (ąĘą░ą┐ąĖčüąĖ čéąĖą┐ą░ ADI_DEV_CMD_VALUE_PAIR).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéčĆčāą║čéčāčĆčŗ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ą░ą║čĆąŠčü _{PID-IDENT}_DEFAULT_DEF_:
#define _{PID-IDENT}_DEFAULT_DEF_#include < {pid-ident.h} >
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüčéčĆčāą║čéčāčĆąĄ ADI_FSS_DEVICE_DEF ą▒čāą┤ąĄčé ą┤ą░ąĮąŠ ąĖą╝čÅ {PID-IDENT}_Def.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ č鹊, čćč鹊 FSS ą▒čāą┤ąĄčé ą┐čŗčéą░čéčīčüčÅ ą┐čĆąĖą╝ąĄąĮąĖčéčī čāą║ą░ąĘą░ąĮąĮčāčÄ č鹊čćą║čā ą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▒čāą║ą▓čŗ ą┤ąĖčüą║ą░ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čüąŠčģčĆą░ąĮčÅčéčī ąĄčæ ą┐čĆąĖ čüą╝ąĄąĮą░čģ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą▒čāą║ą▓ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤čĆą░ą╣ą▓ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, č鹊 čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ NULL. ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčłąĄąĮąĮą░čÅ ą▒čāą║ą░ ąĮąĄ ą┤ąŠčüčéčāą┐ąĮą░ ąĮą░ ą╗čÄą▒ąŠą╣ čüčéą░ą┤ąĖąĖ, č鹊 FSS ąĮą░ąĘąĮą░čćąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ą▒čāą║ą▓čā ą┤ąĖčüą║ą░, ąĮą░čćąĖąĮą░čÅ čü ą▒čāą║ą▓čŗ "C". ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąŚą░č鹥ą╝ ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_DEVICE_DEF ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ FSS čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_fss_Init(), ąĮą░ą┐čĆąĖą╝ąĄčĆ:
{ ADI_FSS_CMD_ADD_DRIVER, (void*)&{PID-IDENT}_Def },
ąæčāą┤čāčćąĖ ąŠčéą║čĆčŗč鹊ą╣ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣, FSS ąĘą░ą┐čĆąŠčüąĖčé ą░ą║čéąĖą▓ą░čåąĖčÄ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ ą┐ą░čĆąŠą╣ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_PID_CMD_MEDIA_ACTIVATE, (void *)TRUE },
ąÆ čŹč鹊ą╣ č鹊čćą║ąĖ PID ą┤ąŠą╗ąČąĄąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ADI_FSS_RESULT_SUCCESS, ąĄčüą╗ąĖ ą▓čüąĄ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, ąĖą╗ąĖ ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čéąĖčéčī ADI_FSS_RESULT_FAILED. ąĢčüą╗ąĖ PID ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA, č鹊 PID ąĮą░ čŹč鹊ą╣ čüčéą░ą┤ąĖąĖ ą┤ąŠą╗ąČąĄąĮ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čü ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆąŠą╣ ą║ąŠą╝ą░ąĮą┤:
{ ADI_DEV_CMD_SET_DATAFLOW, (void*)TRUE },
ąØą░čćąĖąĮą░čÅ čü čŹč鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ąĮą░ ąĘą░ą┐čĆąŠčüčŗ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (mass storage device), ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąźąĄąĮą┤ą╗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ adi_dev_Control() čŹč鹊 čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open().
ąÜąŠą│ą┤ą░ PID ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ, ąŠąĮ ą▒čāą┤ąĄčé ąŠą┐čĆąŠčłąĄąĮ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąĖ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ. ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüą┤ąĄą╗ą░čéčī čŹč鹊, FSS ą┐ąĄčĆąĄą┤ą░čüčé ą┤čĆą░ą╣ą▓ąĄčĆčā PID ą░ą┤čĆąĄčü čüą▓ąŠąĄą╣ callback-čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆąŠą╣ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_PID_CMD_SET_DIRECT_CALLBACK, (void *)< callback-čäčāąĮą║čåąĖčÅ-FSS > },
ąŁčéą░ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ/ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ (media insertion/removal), ąĖ čéą░ą║ąČąĄ ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ čĆą░ąĘą┤ąĄą╗ą░ (partition) ąĖą╗ąĖ č鹊ą╝ą░ (volume), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī.
ąöą╗čÅ ąŠą┐čĆąŠčüą░ ąĮą░ą╗ąĖčćąĖčÅ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ FSS ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā PID čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ą░čĆčā ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_PID_CMD_POLL_MEDIA_CHANGE, (void*)NULL },
ąĢčüą╗ąĖ ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ, č鹊 PID ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ FSS, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓čŗčłąĄ. ąŁč鹊čé callback ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąĄą╣čüčéą▓čāčÄčēąĖą╝, ąĖ ąŠąĮ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą░čĆą│čāą╝ąĄąĮčéą░ą╝ąĖ:
1. ąÉą┤čĆąĄčü DeviceHandle, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open().
2. ąĪąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_MEDIA_INSERTED.
3. ąÉą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ u32. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Number) čåąĄą┐ąŠčćą║ąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąŠčüąĖč鹥ą╗čī, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąØą░ ą▓čŗčģąŠą┤ąĄ ąĖąĘ callback-čäčāąĮą║čåąĖąĖ čŹčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░, ą╗ąĖą▒ąŠ ADI_FSS_RESULT_FAILED, ą╗ąĖą▒ąŠ ADI_FSS_RESULT_SUCCESS, ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 FSS ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░ą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ.
ąĢčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ą╗ ąĖąĘą▓ą╗ąĄč湥ąĮąĖąĄ ąĮąŠčüąĖč鹥ą╗čÅ, č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_MEDIA_REMOVED ą▓ callback-čäčāąĮą║čåąĖčÄ DMcallback. ąÆąŠčé ą░čĆą│čāą╝ąĄąĮčéčŗ callback-čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ:
1. ąÉą┤čĆąĄčü DeviceHandle, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open().
2. ąĪąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_MEDIA_REMOVED.
3. ąÉą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ u32. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Number) čåąĄą┐ąŠčćą║ąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąŠčüąĖč鹥ą╗čī, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. ąØą░ ą▓čŗčģąŠą┤ąĄ ąĖąĘ callback-čäčāąĮą║čåąĖąĖ čŹčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮą░.
ąÆ ąŠčéą▓ąĄčé ąĮą░ čāčüčéą░ąĮąŠą▓ą║čā ąĮąŠčüąĖč鹥ą╗čÅ FSS ą▒čāą┤ąĄčé ąĖąĮčüčéčĆčāą║čéąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ č鹊ą╝ąŠą▓/čĆą░ąĘą┤ąĄą╗ąŠą▓ ą▓čŗą┤ą░č湥ą╣ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_PID_CMD_DETECT_VOLUMES, (void*)< device-number > },
ąŚąĮą░č湥ąĮąĖąĄ < device-number > ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī, čéą░ą╝ ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ, ąĮąŠą╝ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮą░ ą║ą░ą▒ąĄą╗ąĄ ATA ą╝ąŠąČąĄčé ą▒čŗčéčī 2 ą┤ąĖčüą║ą░).
ą¤čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖčüą┐čĆą░ą▓ąĮąŠą│ąŠ č鹊ą╝ą░ ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_VOLUME_DETECTED ą▓ callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ FSS. ąÆąŠčé ąĄčæ ą░čĆą│čāą╝ąĄąĮčéčŗ:
1. ąÉą┤čĆąĄčü DeviceHandle, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ čäčāąĮą║čåąĖčÄ adi_pdd_Open().
2. ąĪąŠą▒čŗčéąĖąĄ ADI_FSS_EVENT_VOLUME_DETECTED.
3. ąÉą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_VOLUME_DEF, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĄą╣ č鹊ą╝.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID, ą║ąŠą│ą┤ą░ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĄąĘ FSS. ąÜąŠą│ą┤ą░ PID ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ čĆą░ąĘą▒ąĖąĄąĮąĖąĄ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čĆą░ąĘą┤ąĄą╗čŗ (partitioning), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąĄčĆąĖč乥čĆąĖčÄ USB (ą│ą┤ąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čģąŠčüč鹊ą╝ PC), ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī PID ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé ą║ąŠąĮč鹥ą║čüčéą░ FSS. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüą░ąĮčŗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čéą░ą║ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ąĪčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ {PID-IDENT}_Def (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_DEVICE_DEF) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ adi_dev_Open(), čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ PID:
Result = adi_dev_Open (< DeviceManagerHandle >,
{PID-IDENT}_Def.pEntryPoint,
{PID-IDENT}_Def.DeviceNumber,
&{PID-IDENT}_Def.ClientHandle,
&{PID-IDENT}_Def.DeviceHandle,
{PID-IDENT}_Def.Direction,
< DMAManagerHandle >,
< DCBQueueHandle >,
< Callback-function >);
ąØčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤čĆčāą│ąĖąĄ ą░čĆą│čāą╝ąĄąĮčéčŗ. < DeviceManagerHandle > ąĖ < DMAManagerHandle > čŹč鹊 č鹊, čćč鹊 ą┐ąŠą╗čāč湥ąĮąŠ ąĖąĘ ąŠą▒čŗčćąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒ ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. < DCBQueueHandle > čŹč鹊 čģąĄąĮą┤ą╗ ą┤ą╗čÅ ąŠč湥čĆąĄą┤ąĖ DCB, ąĄčüą╗ąĖ ą▓čŗąĘąŠą▓čŗ callback-čäčāąĮą║čåąĖąĖ < Callback-function > ąĖąĘ PID čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ąŠčéą╗ąŠąČąĄąĮąĮčŗąĄ.
ąŚą░č鹥ą╝ PID ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čü čéčĆąĄą▒čāąĄą╝čŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ (čüą╝. čüąĄą║čåąĖčÄ "ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ") ąĖ ą╗čÄą▒čŗą╝ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čüą╝. čüąĄą║čåąĖčÄ "ąŻčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ").
< Callback-function >, ą┐ąĄčĆąĄą┤ą░ąĮąĮą░čÅ ą▓ ą▓čŗąĘąŠą▓ adi_dev_Open(), ą▒čāą┤ąĄčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĮąĄ ąĖąĘ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ (PDD) ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą░ ąĖąĘ čćą░čüčéąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąĢčüą╗ąĖ ą▒čŗą╗ čāą║ą░ąĘą░ąĮ čģąĄąĮą┤ą╗ ąŠč湥čĆąĄą┤ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ callback-čäčāąĮą║čåąĖą╣ < DCBQueueHandle >, č鹊 č鹊ą│ą┤ą░ ą▓čŗąĘąŠą▓čŗ callback-čäčāąĮą║čåąĖą╣ ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą║ą░ą║ ąŠčéą╗ąŠąČąĄąĮąĮčŗąĄ. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠčåąĄą┤čāčĆą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ callback-ąŠą▓ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ čéčĆąĄą▒čāąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗčģ (ąĮąĄ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ) ą▓čŗąĘąŠą▓ąŠą▓ callback-čäčāąĮą║čåąĖą╣ ą╗ąĖą▒ąŠ ą▓ č鹊ą╣ ąČąĄ callback-čäčāąĮą║čåąĖąĖ (ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą▓ čüą╗čāčćą░ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ąĄ FSS), ą╗ąĖą▒ąŠ ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╣ čäčāąĮą║čåąĖąĖ. ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ PID ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PID_CMD_SET_DIRECT_CALLBACK, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ, ą┐ąŠčüą▓čÅčēąĄąĮąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü FSS.
ążčāąĮą║čåąĖčÅ (ąĖą╗ąĖ čäčāąĮą║čåąĖąĖ) callback ą┤ąŠą╗ąČąĮčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠą▒čŗčéąĖčÅ. ąÆąŠ ą▓čüąĄčģ čŹčéąĖčģ čüąŠą▒čŗčéąĖčÅčģ ą┐ąĄčĆą▓čŗą╣ ąĄčæ ą░čĆą│čāą╝ąĄąĮčé čŹč鹊 ą░ą┤čĆąĄčü ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ čģąĄąĮą┤ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ PID, čā ą║ąŠč鹊čĆąŠą│ąŠ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī ą▓ ą▓čŗąĘąŠą▓ąĄ adi_dev_Open() (ąĖą╝ąĄąĮąŠą▓ą░ąĮąĮąŠąĄ ą║ą░ą║ &{PID-IDENT}_Def.DeviceHandle); čüąŠą▒čŗčéąĖąĄ (Event) ą▓ąŠ ą▓č鹊čĆąŠą╝ ą░čĆą│čāą╝ąĄąĮč鹥 ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čéčĆąĄčéčīąĄą╝ ą░čĆą│čāą╝ąĄąĮč鹥 ą▒čāą┤ąĄčé ąŠą┤ąĮąĖą╝ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ.
1. ADI_FSS_EVENT_MEDIA_INSERTED. ąóčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▒čāą┤ąĄčé ą░ą┤čĆąĄčüąŠą╝ ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąŠčüąĖč鹥ą╗čī. ą¤čĆąĖ ą▓čŗčģąŠą┤ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ čāčüą┐ąĄčłąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ callback-čäčāąĮą║čåąĖąĖ.
2. ADI_FSS_EVENT_MEDIA_REMOVED. ąöą╗čÅ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ąĮąĄ ąĖą╝ąĄąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ąöąĄą╣čüčéą▓ąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčŗ, ąĘą░ą▓ąĖčüčÅčé ąŠčé ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
3. ADI_FSS_EVENT_VOLUME_DETECTED. ąŚą┤ąĄčüčī čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé čŹč鹊 ą░ą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_VOLUME_DEF, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ č鹊ą╝ (ąŠą┐ąĖčüą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĄčæ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüą╝. ą▓čŗčłąĄ). ąöąĄą╣čüčéą▓ąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčŗ, ąĘą░ą▓ąĖčüčÅčé ąŠčé ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
4. ADI_DEV_EVENT_BUFFER_PROCESSED. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA. ąóčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé pArg ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą┐ąŠą╗ąĄ CallbackParameter čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_1D_BUFFER, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą┤ą░ąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(). ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą▒čĆą░ą╝ą╗čÅčÄčēčāčÄ čüčéčĆčāą║čéčāčĆčā ADI_FSS_SUPER_BUFFER. ąÆ čŹč鹊ą╝ čüąŠą▒čŗčéąĖąĖ callback-čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘą▓ą░čéčī PID č湥čĆąĄąĘ ąĄą│ąŠ callback-čäčāąĮą║čåąĖčÄ, ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┐ąŠą╗ąĄą╝ PIDCallbackFunction čüčéčĆčāą║čéčāčĆčŗ čüčāą┐ąĄčĆą▒čāč乥čĆą░ ADI_FSS_SUPER_BUFFER. ąóčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ čŹč鹊ą╝ ą▓čŗąĘąŠą▓ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ PIDCallbackHandle čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_SUPER_BUFFER ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ Event ąĖ pArg:
(pSuperBuffer->PIDCallbackFunction) (pSuperBuffer->PIDCallbackHandle,
Event,
pArg);
ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ, ąĘą░ą▓ąĖčüčÅčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ pNext ą▓ ą▒čāč乥čĆąĄ ąĮąĄ 0, ąĖ ąĘąĮą░č湥ąĮąĖąĄ SectorCount ąĘą░ą┐čĆąŠčüą░ LBA ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠą┤ą▒čāč乥čĆąĄ ąĮąĄ 0, č鹊 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓ ąŠč湥čĆąĄą┤čī čüą╗ąĄą┤čāčÄčēąĖą╣ ąĘą░ą┐čĆąŠčü LBA čü PID, ą║ą░ą║ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ą░ FSS. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ".
5. ADI_PID_EVENT_DEVICE_INTERRUPT. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čüą░ą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ąĖą┤ąĄąĮčéąĖčćąĮąŠ čüąŠą▒čŗčéąĖčÄ ADI_DEV_EVENT_BUFFER_PROCESSED, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čüąŠą▒čŗčéąĖąĖ.
ąŻčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąóą░ą▒ą╗ąĖčåą░ ąĮąĖąČąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą╣čüčÅ čüąĖčüč鹥ą╝čŗ, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ (command ID), ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ, ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąøčÄą▒čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ, ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ.
ąŁčéą░ čéą░ą▒ą╗ąĖčåą░ ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆąĄčćąĖčüą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąĄčĆą▓čŗą╣ čüč鹊ą╗ą▒ąĄčå čüąŠą┤ąĄčƹȹĖčé ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, čüą╗ąĄą┤čāčÄčēąĖą╣ čüč鹊ą╗ą▒ąĄčå ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, čéčĆąĄčéąĖą╣ čüč鹊ą╗ą▒ąĄčå ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čüč鹊ą╗ą▒ąĄčå čüąŠą┤ąĄčƹȹĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ ą▓ąĖą┤ąĄąŠ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ č乊čĆą╝ą░čé NTSC, ąĮąŠ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī ąĖ č乊čĆą╝ą░čé PAL. ąöąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐ąĖčüąĖ ą▓ čŹčéčā čéą░ą▒ą╗ąĖčåčā ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ.
| ąŁą╗ąĄą╝ąĄąĮčé |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ |
Command ID |
| ą×ąČąĖą┤ą░ąĄą╝čŗą╣ ą░čĆą│čāą╝ąĄąĮčé |
NULL |
ąÉą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖą╗ąĖ čüčéčĆčāą║čéčāčĆčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą╗čāąČą▒ąĄ FSS ąŠąČąĖą┤ą░čÄčēąĄą╣ čäčāąĮą║čåąĖąĖ, ą│ą┤ąĄ čŹč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ. |
ADI_FSS_CMD_SET_PEND_ARGUMENT |
| ąśąĮą┤ąĄą║čü ą║čāčćąĖ ą║čŹčłą░ |
-1 |
ąśąĮą┤ąĄą║čü ą║čāčćąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą┤ ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. |
ADI_FSS_CMD_SET_CACHE_HEAP_ID |
| ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čåąĄą┐ąŠčćą║ąĄ |
1 |
1 ąĖą╗ąĖ 2. |
ADI_PID_CMD_SET_NUMBER_DEVICES |
| ąĪą║ąŠčĆąŠčüčéčī čćč鹥ąĮąĖčÅ (ą┤ą╗čÅ ąŠą┐čéąĖč湥čüą║ąĖčģ ą┐čĆąĖą▓ąŠą┤ąŠą▓) |
ąÜą░ą║ ą┤ąĖą║čéčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
1 .. n, ą│ą┤ąĄ n čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
ADI_PID_CMD_SET_READ_SPEED |
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąÜčĆąŠą╝ąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāąĄčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čāą║ą░ąĘą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčāčÄ ąĮąĖąČąĄ.
ąŁčéą░ čéą░ą▒ą╗ąĖčåą░ ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆąĄčćąĖčüą╗ąĖčéčī ą▓čüąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čāą║ą░ąĘą░čéčī ąŠą▒čŗčćąĮąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čéčĆąĄą▒čāąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą║ą╗ąĖąĄąĮčé ą╝ąŠąČąĄčé čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ (čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čāąČąĄ ą▓ą║ą╗čÄč湥ąĮą░ ą▓ čéą░ą▒ą╗ąĖčåčā, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮą░). ąŚą░ą┐ąĖčüąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čāčüčéą░ąĮąŠą▓ąŠą║, čéą░ą║ąĖčģ ą║ą░ą║ čéą░ą╣ą╝ąĄčĆčŗ, ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čäą╗ą░ą│ąĖ (ą▓čŗą▓ąŠą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ ąĮąĖąČąĄą╗ąĄąČą░čēąĖąĄ čüą╗čāąČą▒čŗ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą░čāą┤ąĖąŠą║ąŠą┤ąĄą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ SPORT ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┐ąŠ ąĮąĄą║ąŠč鹊čĆčŗą╝ ą┐čĆąĖčćąĖąĮą░ą╝ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPORT, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī čāą║ą░ąĘą░čéčī, ą║ą░ą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPORT ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ.
| ąŁą╗ąĄą╝ąĄąĮčé |
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ |
Command ID |
| ą£ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą╝ąĄč鹊ą┤ ADI_DEV_MODE_CHAINED (čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ą£ąĄč鹊ą┤čŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ"). |
ADI_DEV_CMD_SET_DATAFLOW_METHOD |
| Callback FSS |
ąÉą┤čĆąĄčü čäčāąĮą║čåąĖąĖ FSS. |
ADI_PID_CMD_SET_DIRECT_CALLBACK |
| ąĀą░ąĘą╝ąĄčĆ (čłąĖčĆąĖąĮą░) 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ |
ąĪą╝. čĆą░ąĘą┤ąĄą╗ "ąÜąŠą╝ą░ąĮą┤čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID". |
ADI_FSS_CMD_GET_DATA_ELEMENT_WIDTH |
| ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ č乊ąĮąŠą▓ąŠą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. |
ąĪą╝. čĆą░ąĘą┤ąĄą╗ "ąÜąŠą╝ą░ąĮą┤čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID". |
ADI_FSS_CMD_GET_BACKGRND_XFER_SUPPORT |
[ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ]
ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą▓ą░ąČąĮąŠ čĆą░ąĘą┤ąĄą╗ąĖčéčī čüąŠą▒čŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ, physical mass storage device) ąĖ čüąŠą▒čŗčéąĖčÅ čģąŠčüčéą░ (ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ). ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ - ąĄčüą╗ąĖ ąĮąĄ ą┤ą╗čÅ ą▓čüąĄčģ - čāčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą░ą║čéąĖą▓ąĮąŠ ąŠčé ą┐čĆąĖąĄą╝ą░ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ąŠ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüąĄą║č鹊čĆąŠą▓ ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą£čŗ ą▒čāą┤ąĄą╝ čüčüčŗą╗ą░čéčīčüčÅ ąĮą░ čŹč鹊 ą║ą░ą║ ąĮą░ ą▒ą╗ąŠą║ DRQ, ą┐ąŠčüą╗ąĄ ą┐čĆąŠčåąĄčüčüą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ATA. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čģąŠčüčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ąŠąĮ ą┐ąŠą╗čāčćą░ąĄčé callback ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ADI_DEV_1D_BUFFER.
ąōą┤ąĄ čåąĄą┐ąŠčćą║ą░ čéą░ą║ąĖčģ ą▒čāč乥čĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮąŠčüąĖč鹥ą╗čÅ, ąĖ ąŠą┤ąĖąĮ ąĘą░ą┐čĆąŠčü LBA ą▒čŗą╗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮ ą┤čĆą░ą╣ą▓ąĄčĆčā PID, čćč鹊ą▒čŗ ą┐ąŠą║čĆčŗčéčī čåąĄą┐ąŠčćą║čā ąĖą╗ąĖ čćą░čüčéčī, ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čģąŠčüčéą░ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ ą▒ą╗ąŠą║ą░ DRQ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ PID ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą┤ąŠčüčéčāą┐ ą║ ą┤čĆą░ą╣ą▓ąĄčĆčā ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒ą╗ąŠą║ą░ DRQ. ąŁč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čüąĄą╝ą░č乊čĆą░ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ Lock Semaphore, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ąĪą╗čāąČą▒čŗ ąĪąĄą╝ą░č乊čĆąŠą▓ ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ čü ąĮą░čćą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ 1, ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║:
adi_sem_Create ( 1, &pDevice->LockSemaphoreHandle, NULL );
ąŁč鹊čé čüąĄą╝ą░č乊čĆ ą┤ąŠą╗ąČąĄąĮ ąŠąČąĖą┤ą░čéčīčüčÅ ą┐čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ADI_FSS_CMD_ACQUIRE_LOCK_SEMAPHORE:
adi_sem_Pend ( pDevice->LockSemaphoreHandle, ADI_SEM_TIMEOUT_FOREVER);
ąś ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčīčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_FSS_CMD_RELEASE_LOCK_SEMAPHORE:
adi_sem_Post ( pDevice->LockSemaphoreHandle);
ą¤čĆąŠčåąĄčüčü ą▓čŗą┤ą░čćąĖ ąĘą░ą┐čĆąŠčüą░ (ąŠą▒čŗčćąĮąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ, File System Driver, FSD) ą┤ąĄą╗ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. ą¤ąŠą╗čāčćą░ąĄčé Lock Semaphore ąĖąĘ PID ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_FSS_CMD_ACQUIRE_LOCK_SEMAPHORE, NULL },
2. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐čĆąŠčü LBA ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ ą┤ą╗čÅ PID ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ:
{ ADI_PID_CMD_SEND_LBA_REQUEST, (void*)&pSuperBuffer->LBARequest },
PID ą┤ąŠą╗ąČąĄąĮ ąĮą░ąĘąĮą░čćąĖčéčī ą┐ąŠą╗čÅ PIDCallbackFunction ąĖ PIDCallbackHandle čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_SUPER_BUFFER (čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ), čāą║ą░ąĘčŗą▓ą░ąĄą╝ąŠą╣ ą┐ąŠą╗ąĄą╝ pBuffer ąĘą░ą┐čĆąŠčüą░ LBA, ąĖ čüąŠčģčĆą░ąĮčÅąĄčé ą║ąŠą┐ąĖčÄ čüčéčĆčāą║čéčāčĆčŗ ąĘą░ą┐čĆąŠčüą░ LBA ą▓ čüą▓ąŠąĖčģ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ.
3. ąŚą░č鹥ą╝ ą┤čĆą░ą╣ą▓ąĄčĆ FSD ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆ čåąĄą┐ąŠčćą║ąĖ ą┤ą╗čÅ PID ą▓čŗąĘąŠą▓ąŠą╝ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(), ąĮą░ą┐čĆąĖą╝ąĄčĆ:
adi_dev_Read{ ..., ADI_DEV_1D, (ADI_DEV_BUFFER*)pSuperBuffer },
4. ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┤čĆą░ą╣ą▓ąĄčĆčā PID:
{ ADI_PID_CMD_ENABLE_DATAFLOW, (void*)TRUE },
Lock Semaphore ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ąĮą░ čüčéą░ą┤ąĖąĖ 1 ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ FSD ą╗ąĖą▒ąŠ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą▒ą╗ąŠą║ą░ DRQ ą┤ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą▒čāč乥čĆą░ (ą║ąŠą│ą┤ą░ ąĮąĄčé čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓), ą╗ąĖą▒ąŠ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą▒ą╗ąŠą║ą░ DRQ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ ą┐ąŠą┤ą▒čāč乥čĆąĄ čåąĄą┐ąŠčćą║ąĖ.
ąØą░ čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čģąŠčüčéą░ ą┤čĆą░ą╣ą▓ąĄčĆ PID, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ą░čüčé čüąŠą▒čŗčéąĖąĄ ADI_DEV_EVENT_BUFFER_PROCESSED č湥čĆąĄąĘ čćą░čüčéčī ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąöčĆą░ą╣ą▓ąĄčĆčŗ PID, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA, ą┤ąŠą╗ąČąĮčŗ ą▓čŗą┤ą░čéčī čŹč鹊 čüąŠą▒čŗčéąĖąĄ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ. ąØą░ čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ą░ąČą┤ąŠą╣ ąĄą┤ąĖąĮąĖčåčŗ DRQ ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ADI_PID_EVENT_DEVICE_INTERRUPT. ąŁčéčé callback-ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮčŗ č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą░čĆą│čāą╝ąĄąĮčéą░ą╝ąĖ:
1. DeviceHandle, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą║ą░ą║ čéčĆąĄčéąĖą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ ą▓čŗąĘąŠą▓ąĄ adi_pdd_Open().
2. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ čüąŠą▒čŗčéąĖčÅ.
3. ąŚąĮą░č湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ pBuffer ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĘą░ą┐čĆąŠčüą░ LBA, čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╣ ąĮą░ čüčéą░ą┤ąĖąĖ 2 ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓čŗčłąĄ ą┐čĆąŠčåąĄčüčüą░.
ąÆ ąŠčéą▓ąĄčé ąĮą░ čŹčéąĖ čüąŠą▒čŗčéąĖčÅ FSS ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓čŗąĘąŠą▓ PID čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą╗ąĄą╣ PIDCallbackFunction ąĖ PIDCallbackHandle čüčéčĆčāą║čéčāčĆčŗ ADI_FSS_SUPER_BUFFER (čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ):
(pSuperBuffer->PIDCallbackFunction) (pSuperBuffer->PIDCallbackHandle,
Event,
pArg);
ąÆ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ PID ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī č鹊, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą▓ ą║ą░ąČą┤ąŠą╝ ąĖąĘ 2 čüąŠą▒čŗčéąĖą╣. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓ ąŠčéą▓ąĄčé ąĮą░ čüąŠą▒čŗčéąĖąĄ ADI_PID_EVENT_DEVICE_INTERRUPT ą┤čĆą░ą╣ą▓ąĄčĆ PID ą┤ąŠą╗ąČąĄąĮ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī Lock Semaphore ąĖ ą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī čüąĄą╝ą░č乊čĆ PID č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ SemaphoreHandle ADI_FSS_SUPER_BUFFER čĆą░ą▓ąĮąŠ čģąĄąĮą┤ą╗čā čüąĄą╝ą░č乊čĆą░ PID.
ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ąĮąĖąČąĄ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠč鹊ą║ ą║ąŠą╝ą░ąĮą┤ ąĖ ą▓čŗąĘąŠą▓ąŠą▓ callback ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ PID. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ FSD, ąĮąŠ ą┤ą╗čÅ čÅčüąĮąŠčüčéąĖ ąŠąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąŠą┐čāčēąĄąĮ.
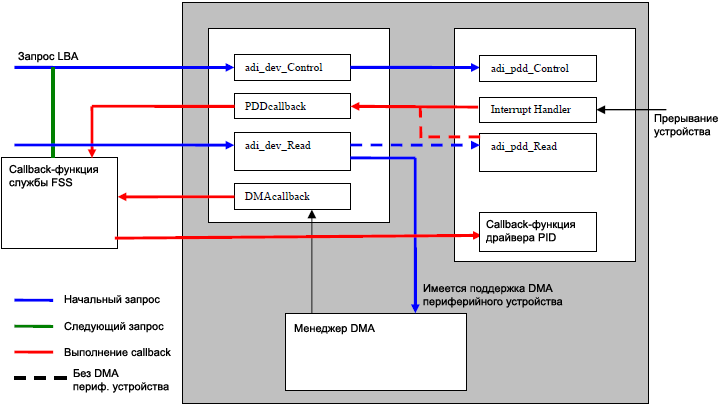
[ąŚą░ą╝ąĄčćą░ąĮąĖčÅ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ]
ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤čŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą┤ą░čÄčé ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ, č鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ čŹč鹊 čüą▓čÅąĘą░ąĮąŠ čü ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą┤ąĄčĆ ą▓ąĖą┤ąĄąŠ ADV7171 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ 1 čüą▓ąŠąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ TWI. ą×ą▒čŗčćąĮąŠ čüčāčēąĄčüčéą▓ąŠą▓ą░ą╗ ą▒čŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą│ąŠą▓ąŠčĆąĖčé ą┤čĆą░ą╣ą▓ąĄčĆčā ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠą┤ąŠą▒ąĮčŗąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčćč鹥ąĮčŗ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ PID.
[ąĪčüčŗą╗ą║ąĖ]
1. Generic_PID_Design_Document.pdf - GENERIC PHYSICAL INTERFACE DRIVER DESIGN (PID) DOCUMENT FOR INCLUSION IN THE FILE SYSTEM SERVICE (FSS) site:analog.com.
2. ąĪą╗čāąČą▒ą░ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ Blackfin.
3. VDK: ą╝ąĄąĮąĄą┤ąČąĄčĆ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓.
4. VDK: čüą╗čāąČą▒ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čäą╗ą░ą│ąŠą▓.
5. VDK: ą╝ąĄąĮąĄą┤ąČąĄčĆ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░.
6. VDK: ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ čüą╗čāąČą▒čŗ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin.
7. RAM Disk PID ą┤ą╗čÅ čüą╗čāąČą▒čŗ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ ADI FSS.
8. Secure Digital Host PID ą┤ą╗čÅ čüą╗čāąČą▒čŗ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ FSS. |



