|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]) ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā sysfs ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčĆčéą░ą╝ąĖ GPIO (General-Purpose Input/Output).
[GPIO Subsystem]
GPIO čŹč鹊 čéąĖą┐ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ (MCU) ąĖą╗ąĖ CPU. ąóą░ą║ąŠą╣ ą┐ąŠčĆčé ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ą▓ą║ą╗čÄčćą░čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ą░) ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čåąĖčäčĆąŠą▓čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ą░. ąØą░ Linux ą▓čŗą▓ąŠą┤čŗ GPIO ą╝ąŠą│čāčé 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ čĆą░ą▒ąŠč湥ąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user space) ąĖ čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ č湥čĆąĄąĘ čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā sysfs, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ą▓čŗą▓ąŠą┤čŗ GPIO ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čåąĄą╗ąĄą╣, čéą░ą║ąĖčģ ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ, I2C, čüąĄč鹥ą▓čŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣.
ąÆ Linux ąĄčüčéčī ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ GPIO (GPIO subsystem driver framework) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ GPIO. ą¦ąĄčĆąĄąĘ čŹčéčā ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 čĆą░ą▒ąŠčéą░čéčī čü ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ CPU. ąŁč鹊čé čäčĆąĄą╣ą╝ą▓ąŠčĆą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą╗čÅ ą▒ą░ąĘąŠą▓čŗčģ čäčāąĮą║čåąĖą╣ ą▓ą▓ąŠą┤ą░ ąĖ ą▓čŗą▓ąŠą┤ą░, ą░ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąæąŠą╗ąĄąĄ ą┤ąĄčéą░ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐ąŠą┤čüąĖčüč鹥ą╝ąĄ GPIO ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ < Linux Kernel Source>/Documentation/gpio.
[GPIO Control (Shell)]
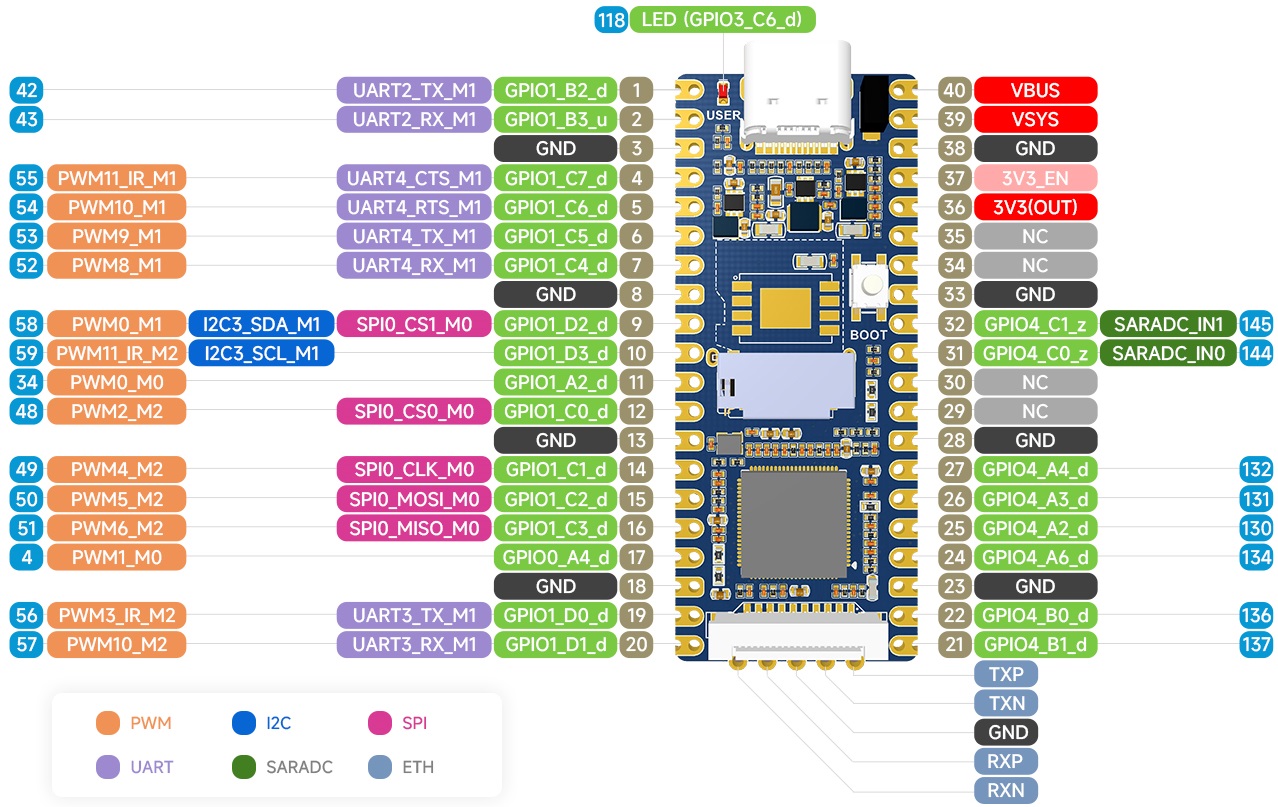
ą¤čĆąĖ 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ą▓ user space ąŠą▒čŗčćąĮąŠ ąĮčāąČąĮčŗ ąĮąŠą╝ąĄčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓. ąŁčéąĖ ąĮąŠą╝ąĄčĆą░ ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ą╗ą░čé. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĖą╝čÅ ą▓čŗą▓ąŠą┤ą░ 4 ą┐ą╗ą░čéčŗ ą▒čāą┤ąĄčé GPIO1_C7_d, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ 55.
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ LuckFox Pico:
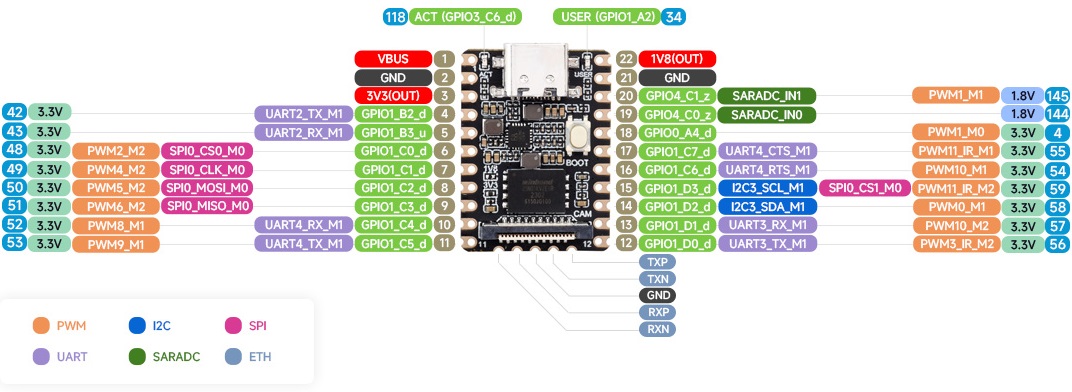
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ LuckFox Pico Mini A/B:
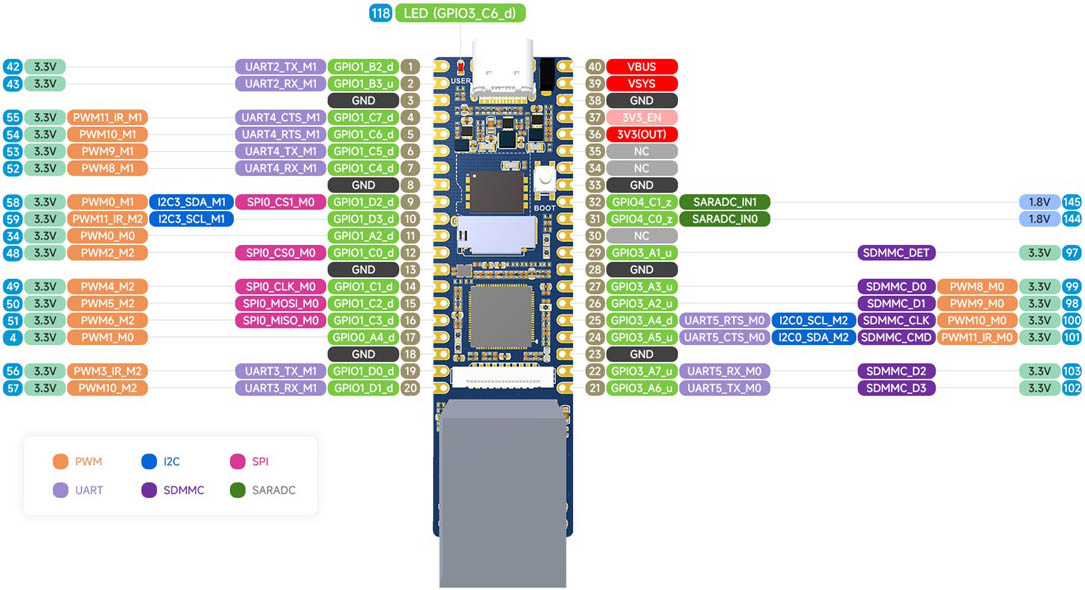
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ LuckFox Pico Plus:
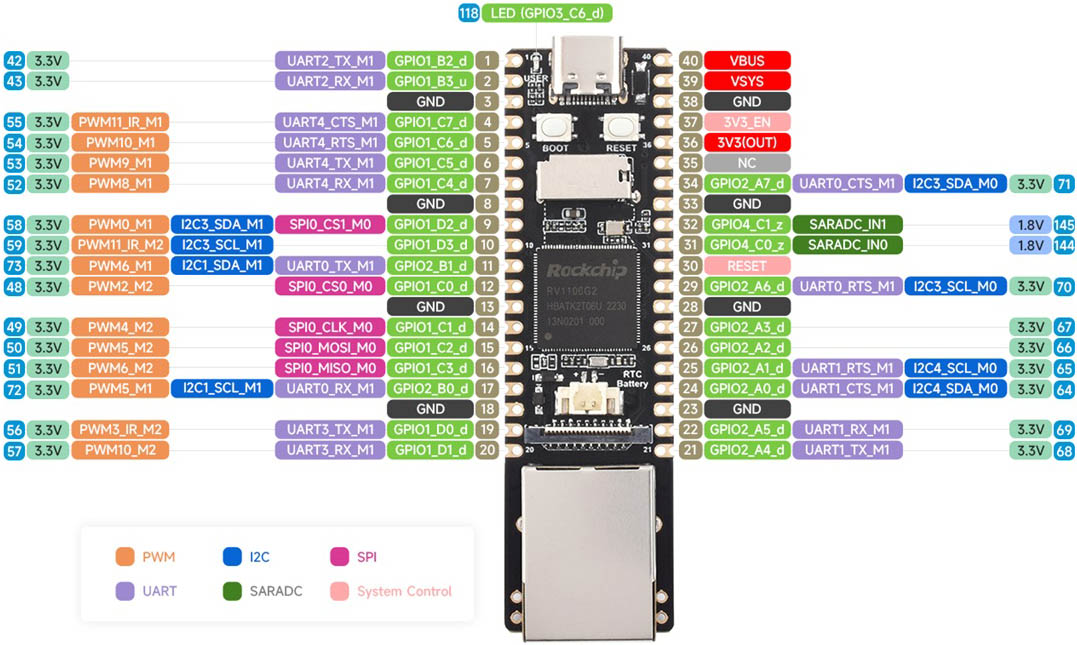
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ LuckFox Pico Pro/Max:
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ LuckFox Pico Ultra/Ultra W:
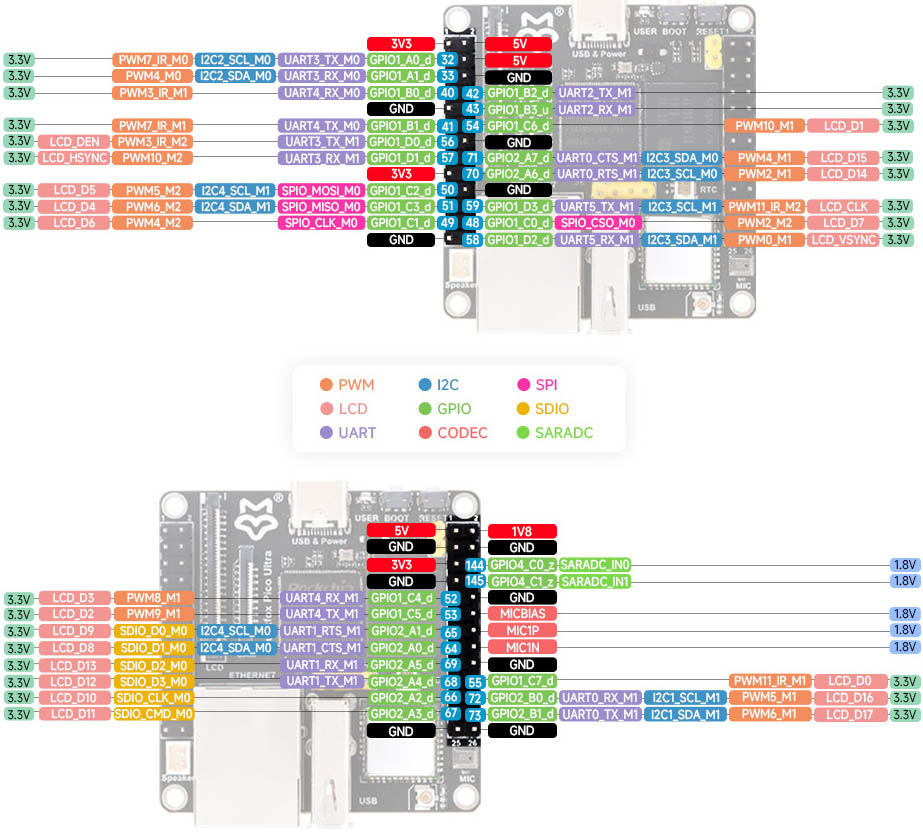
ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮąŠą╝ąĄčĆąŠą▓ ą▓čŗą▓ąŠą┤ąŠą▓. ąØąŠą╝ąĄčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ąŠčĆč鹊ą▓ GPIO ą┐ąŠą╝ąĄč湥ąĮčŗ ąĮą░ ą║ą░čĆčéąĖąĮą║ą░čģ ą▓čŗčłąĄ, ąĖ ą▓čŗ ą╝ąŠąČąĄč鹥 ą╗ąĖą▒ąŠ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ą┐čĆčÅą╝čāčÄ, ą╗ąĖą▒ąŠ ą▓čŗčćąĖčüą╗čÅčéčī ąĖčģ ąĮąŠą╝ąĄčĆą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó GPIO ą┐ąŠą┤ąĄą╗ąĄąĮčŗ ąĮą░ 5 ą▒ą░ąĮą║ąŠą▓: GPIO0 .. GPIO4, ąĖ čā ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ąĮą║ą░ ąĄčüčéčī 4 ą│čĆčāą┐ą┐čŗ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 32 ą▓čŗą▓ąŠą┤ą░: A0 .. A7, B0 .. B7, C0 .. C7, D0 .. D7.
ŌĆó GPIO ąĖą╝ąĄąĮčāčÄčéčüčÅ ą▓ č乊čĆą╝ą░č鹥 GPIO{bank}_{group}{X}, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ:
GPIO0_A0 .. GPIO0_A7
GPIO0_B0 .. GPIO0_B7
GPIO0_C0 .. GPIO0_C7
GPIO0_D0 .. GPIO0_D7
GPIO1_A0 .. GPIO0_A7
...
GPIO1_D0 .. GPIO0_D7
...
GPIO4_D0 .. GPIO0_D7
ŌĆó ąØąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ GPIO ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
pin = bank * 32 + number
ąØąŠą╝ąĄčĆ ą│čĆčāą┐ą┐čŗ GPIO:
number = group * 8 + X
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
pin = bank * 32 + (group * 8 + X)
ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ čĆą░čüčüą╝ąŠčéčĆąĖą╝ GPIO1_C7_d, ą│ą┤ąĄ:
bank: 1
group: 2 (A=0, B=1, C=2, D=3)
X: 7
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ GPIO1_C7_d ą▒čāą┤ąĄčé: 1 x 32 + (2 x 8 + 7) = 55.
ąöąĖčĆąĄą║č鹊čĆąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO. ąÆ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ /sys/class/gpio ą║ą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ GPIO ąĖą╝ąĄąĄčé čüąŠą▒čüčéą▓ąĄąĮąĮčāčÄ ą┐ą░ą┐ą║čā. ąśą╝ąĄąĮą░ ą┐ą░ą┐ąŠą║ čüąŠą┤ąĄčƹȹ░čé gpio (ąĖą╗ąĖ gpiochip), ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ąĮąŠą╝ąĄčĆ. ąØą░ą┐čĆąĖą╝ąĄčĆ, /sys/class/gpio/gpio55 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▓čŗą▓ąŠą┤ ąĮąŠą╝ąĄčĆ 55, ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĮčāąĄčéčüčÅ ą║ą░ą║ GPIO1_C7_d.
ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā:
[root@luckfox ]# ls /sys/class/gpio
export gpiochip0 gpiochip128 gpiochip32 gpiochip96 unexport
ąÉčéčĆąĖą▒čāčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO. ąÆ čŹčéąĖčģ ą┤ąĖčĆąĄą║č鹊čĆąĖčÅčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ čäą░ą╣ą╗čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO, ą▓ą║ą╗čÄčćą░čÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ (direction), ąĘąĮą░č湥ąĮąĖąĄ (value) ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ą╝ąĄčüč鹥 čü ą┤čĆčāą│ąĖą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ. ąÜą░ąČą┤ą░čÅ ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO čüąŠą┤ąĄčƹȹĖčé ąĮą░ą▒ąŠčĆ čäą░ą╣ą╗ąŠą▓ ą░čéčĆąĖą▒čāčéą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO.
1. ą¤čĆąŠčüą╝ąŠčéčĆ čäą░ą╣ą╗ąŠą▓ ą░čéčĆąĖą▒čāčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO 55:
# cd /sys/class/gpio
# echo 55 > /sys/class/gpio/export
# cd gpio55
# ls
value power subsystem active_low
uevent edge device direction
2. ążą░ą╣ą╗čŗ ą░čéčĆąĖą▒čāč鹊ą▓. ąśčüą┐ąŠą╗čīąĘčāčÅ čäą░ą╣ą╗čŗ ą░čéčĆąĖą▒čāč鹊ą▓, ą▓čŗ ą╝ąŠąČąĄč鹥 ą┐čĆąŠčüč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO, čćč鹊ą▒čŗ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ąĖčģ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čüčåąĄąĮą░čĆąĖčÅą╝ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ąĖ ąĖčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝. ąØąĄą║ąŠč鹊čĆčŗąĄ ą║ą╗čÄč湥ą▓čŗąĄ ą░čéčĆąĖą▒čāčéčŗ ą▓ą║ą╗čÄčćą░čÄčé:
ŌĆó ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ (direction): in ą┤ą╗čÅ ą┐ąŠčĆčéą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ ą▓čģąŠą┤, out ą┤ą╗čÅ ą┐ąŠčĆčéą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ ą▓čŗčģąŠą┤.
ŌĆó ąŚąĮą░č湥ąĮąĖąĄ (value): 0 ą┤ą╗čÅ ą╗ąŠą│. 0, 1 ą┤ą╗čÅ ą╗ąŠą│. 1.
ŌĆó ą¤ąĄčĆąĄą┐ą░ą┤ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (edge): rising ą┤ą╗čÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ, falling ą┤ą╗čÅ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ, both ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓, none ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅą╝ąĖ GPIO. ążą░ą╣ą╗čŗ ą░čéčĆąĖą▒čāč鹊ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąöą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ čäą░ą╣ą╗ /sys/class/gpio/gpio55/value ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┐čāčüą║ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ GPIO pin 55 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ą¤čĆąĖ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ čäą░ą╣ą╗ą░ /sys/class/gpio/gpio55/value ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąĘą░ą┐čāčüą║ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ č鹥ą║čāčēąĄą│ąŠ čāčĆąŠą▓ąĮčÅ GPIO pin 55 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čü čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čäą░ą╣ą╗ą░.
1. ąŁą║čüą┐ąŠčĆčé GPIO 55 ą▓ user space:
# echo 55 > /sys/class/gpio/export
2. ą¦č鹥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ GPIO1_C7_d:
# echo 55 > /sys/class/gpio/export
# echo in > /sys/class/gpio/gpio55/direction
# cat /sys/class/gpio/gpio55/value
3. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╝ GPIO1_C7_d:
# echo out > /sys/class/gpio/gpio55/direction
# echo 1 > /sys/class/gpio/gpio55/value
# echo 0 > /sys/class/gpio/gpio55/value
4. ą×čéą╝ąĄąĮą░ 菹║čüą┐ąŠčĆčéą░ GPIO 55 ąĖąĘ user space:
# echo 55 > /sys/class/gpio/unexport
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ GPIO ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ Python]
ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ąĘčĆąĄčłą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅą╝ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ąĖ čćč鹥ąĮąĖąĄ ąĖčģ čāčĆąŠą▓ąĮąĄą╣.
from periphery import GPIO
import time
Write_Pin = 55
Read_Pin = 54
Write_GPIO = GPIO(Write_Pin, "out")
Read_GPIO = GPIO(Read_Pin, "in")
try:
while True:
try:
Write_GPIO.write(True)
pin_state = Read_GPIO.read()
print(f"Pin state: {pin_state}")
Write_GPIO.write(False)
pin_state = Read_GPIO.read()
print(f"Pin state: {pin_state}")
time.sleep(1)
except KeyboardInterrupt:
Write_GPIO.write(False)
break
except IOError:
print("Error")
finally:
Write_GPIO.close()
Read_GPIO.close()
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ GPIO. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā periphery, čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ą┤ą▓ą░ ą▓čŗą▓ąŠą┤ą░ GPIO ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ Python. Write_GPIO ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░, ąĖ Read_GPIO ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░.
Write_GPIO = GPIO(Write_Pin, "out")
Read_GPIO = GPIO(Read_Pin, "in")
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╝ ąĮą░ ą▓čŗčģąŠą┤ąĄ. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą▒čŖąĄą║čé Write_GPIO ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ True ą▓ ą▓čŗą▓ąŠą┤ GPIO, čćč鹊ą▒čŗ ąĄą│ąŠ ą▓čŗčģąŠą┤ ą┐ąĄčĆąĄčłąĄą╗ ąĮą░ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. ąŚą░ą┐ąĖčüčī ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ False ą▓ ą▓čŗą▓ąŠą┤ GPIO čāčüčéą░ąĮąŠą▓ąĖčé čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▓ ą╗ąŠą│. 0.
Write_GPIO.write(True)
...
Write_GPIO.write(False)
ą¦č鹥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą▓čŗą▓ąŠą┤ą░. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ čüčćąĖčéčŗą▓ą░ąĄčé ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ąŠą▒čŖąĄą║čéą░ Read_GPIO ąĖ ą┐ąĄčćą░čéą░ąĄčé ąĄą│ąŠ. Read_GPIO.read() ą▓ąŠąĘą▓čĆą░čéąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ (True ą┤ą╗čÅ ą╗ąŠą│. 1, False ą┤ą╗čÅ ą╗ąŠą│. 0).
pin_state = Read_GPIO.read()
print(f"Pin state: {pin_state}")
ąöą╗čÅ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čĆąĄą┤ą░ą║č鹊čĆ vi ąĖą╗ąĖ nano.
ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 ą║ąŠą┤ ą▓ ą▒čāč乥čĆ ąŠą▒ą╝ąĄąĮą░, ą▓čüčéą░ą▓čīč鹥 ą▓ čĆąĄą┤ą░ą║č鹊čĆąĄ ąĖ čüąŠčģčĆą░ąĮąĖč鹥 čäą░ą╣ą╗. ąŚą░ą┐čāčüčéąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā ą║ąŠą╝ą░ąĮą┤ąŠą╣:
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ GPIO ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ C]
ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąĄą║čåąĖčÅčģ ą▒čŗą╗ąŠ ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ GPIO čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ echo ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Python. ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą┤ą░ą║č鹊čĆ vi ąĖą╗ąĖ nano ą┤ą╗čÅ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ čäą░ą╣ą╗ąŠą▓, ąŠą┤ąĮą░ą║ąŠ ąĮčāąČąĮąŠ ąŠą▒čĆą░čēą░čéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ą┐čĆą░ą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐čĆąĖ ą▓ąĮąĄčüąĄąĮąĖąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą╝čŗ ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ C-čäčāąĮą║čåąĖąĖ ąĖą╗ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ ą▓čŗąĘąŠą▓čŗ, čćč鹊ą▒čŗ čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī čäą░ą╣ą╗čŗ čāčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ čćą░čüč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, čćč鹊ą▒čŗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ čäą░ą╣ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥. ąöą░ą▓ą░ą╣č鹥 ą▓ą╝ąĄčüč鹥 čĆą░čüčüą╝ąŠčéčĆąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čłą░ą│ąĖ ą┐ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ.
1. ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ GPIO.
#include < stdio.h>
#include < stdlib.h>
#include < unistd.h>
int main() {
int gpio_pin;
printf("Please enter the GPIO pin number: ");
scanf("%d", &gpio_pin);
FILE *export_file = fopen("/sys/class/gpio/export", "w");
if (export_file == NULL) {
perror("Failed to open GPIO export file");
return -1;
}
fprintf(export_file, "%d", gpio_pin);
fclose(export_file);
char direction_path[50];
snprintf(direction_path, sizeof(direction_path),
"/sys/class/gpio/gpio%d/direction", gpio_pin);
FILE *direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "out");
fclose(direction_file);
char value_path[50];
char cat_command[100];
snprintf(value_path, sizeof(value_path),
"/sys/class/gpio/gpio%d/value", gpio_pin);
snprintf(cat_command, sizeof(cat_command), "cat %s", value_path);
FILE *value_file = fopen(value_path, "w");
if (value_file == NULL) {
perror("Failed to open GPIO value file");
return -1;
}
for (int i = 0; i < 3; i++) {
fprintf(value_file, "1");
fflush(value_file);
system(cat_command);
sleep(1);
fprintf(value_file, "0");
fflush(value_file);
system(cat_command);
sleep(1);
}
fclose(value_file);
FILE *unexport_file = fopen("/sys/class/gpio/unexport", "w");
if (unexport_file == NULL) {
perror("Failed to open GPIO unexport file");
return -1;
}
fprintf(unexport_file, "%d", gpio_pin);
fclose(unexport_file);
return 0;
}
ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čŹčéčā ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ.
ąŁą║čüą┐ąŠčĆčé ą▓čŗą▓ąŠą┤ą░ ą▓ User Space. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ čüčćąĖčéą░ąĄčé ą▓ą▓ąĄą┤ąĄąĮąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░, ąŠčéą║čĆąŠąĄčé čäą░ą╣ą╗ /sys/class/gpio/export ąĖ ąĘą░ą┐ąĖčłąĄčé ą▓ ąĮąĄą│ąŠ čŹč鹊 čćąĖčüą╗ąŠ, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą┐ąĄčĆą░čåąĖčÅ čŹą║čüą┐ąŠčĆčéą░ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ GPIO.
printf("Please enter the GPIO pin number: ");
scanf("%d", &gpio_pin);
FILE *export_file = fopen("/sys/class/gpio/export", "w");
if (export_file == NULL) {
perror("Failed to open GPIO export file");
return -1;
}
fprintf(export_file, "%d", gpio_pin);
fclose(export_file);
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ GPIO. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ąŠčéą║čĆąŠąĄčé čäą░ą╣ą╗ /sys/class/gpio/gpiox/direction ąĖ ąĘą░ą┐ąĖčłąĄčé ą▓ ąĮąĄą│ąŠ "out", čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊čé ą▓čŗą▓ąŠą┤ GPIO ą▓ čĆąĄąČąĖą╝ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĄą│ąŠ ą║ą░ą║ ą▓čģąŠą┤, č鹊 ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ "in".
char direction_path[50];
snprintf(direction_path, sizeof(direction_path),
"/sys/class/gpio/gpio%d/direction", gpio_pin);
FILE *direction_file = fopen(direction_path, "w");
if (direction_file == NULL) {
perror("Failed to open GPIO direction file");
return -1;
}
fprintf(direction_file, "out");
fclose(direction_file);
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╝ ą▓čŗčģąŠą┤ą░ GPIO. ąŁč鹊čé ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│ąĖą║ąĖ ą▓čŗą▓ąŠą┤ą░ GPIO. ąĪąĮą░čćą░ą╗ą░ ą▓ą░ą╝ ąĮčāąČąĮąŠ ąŠčéą║čĆčŗčéčī čäą░ą╣ą╗ /sys/class/gpio/gpiox/value, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ GPIO. ąÆ čåąĖą║ą╗ąĄ ą╝čŗ čāą┐čĆą░ą▓ą╗čÅąĄą╝ ą▓čŗčģąŠą┤ąŠą╝, ąĘą░ą┐ąĖčüčŗą▓ą░čÅ ą▓ čŹč鹊čé čäą░ą╣ą╗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ "1" ąĖ "0". ąŚą░č鹥ą╝ ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą║ąŠą╝ą░ąĮą┤čā cat ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čäą░ą╣ą╗, ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąĘą░ą┐ąĖčüą░ąĮąŠ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ C ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ ąŠą┐ąĄčĆą░čåąĖą╣ čü čäą░ą╣ą╗ą░ą╝ąĖ, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čäą░ą╣ą╗ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 fprintf ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ, č鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą┐čĆąŠčüč鹊 ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ ą▒čāč乥čĆ ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▓ čäą░ą╣ą╗. ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥, čćč鹊ą▒čŗ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ čäą░ą╣ą╗, č鹊 ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ fflush ą┤ą╗čÅ "čüą╗ąĖą▓ą░" ą▒čāč乥čĆą░, čćč鹊 ąĘą░čüčéą░ą▓ąĖčé ą┤ą░ąĮąĮčŗąĄ ą▒čāč乥čĆą░ ąĘą░ą┐ąĖčüą░čéčīčüčÅ ą▓ čäą░ą╣ą╗, ą╗ąĖą▒ąŠ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą┐ąŠčüąŠą▒ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ fopen -> fprintf -> fclose ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┐ąĖčüąĖ.
char value_path[50];
char cat_command[100];
snprintf(value_path, sizeof(value_path),
"/sys/class/gpio/gpio%d/value", gpio_pin);
snprintf(cat_command, sizeof(cat_command),
"cat %s", value_path);
FILE *value_file = fopen(value_path, "w");
if (value_file == NULL) {
perror("Failed to open GPIO value file");
return -1;
}
for (int i = 0; i < 3; i++) {
fprintf(value_file, "1");
fflush(value_file);
system(cat_command);
sleep(1);
fprintf(value_file, "0");
fflush(value_file);
system(cat_command);
sleep(1);
}
fclose(value_file);
ą×čéą╝ąĄąĮą░ 菹║čüą┐ąŠčĆčéą░ ą▓čŗą▓ąŠą┤ą░. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ąŠčéą║čĆąŠąĄčé čäą░ą╣ą╗ /sys/class/gpio/unexport ąĖ ąĘą░ą┐ąĖčłąĄčé ą▓ ąĮąĄą│ąŠ ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░, č湥ą╝ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąŠčéą╝ąĄąĮą░ ąŠą┐ąĄčĆą░čåąĖąĖ 菹║čüą┐ąŠčĆčéą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░ GPIO.
FILE *unexport_file = fopen("/sys/class/gpio/unexport", "w");
if (unexport_file == NULL) {
perror("Failed to open GPIO unexport file");
return -1;
}
fprintf(unexport_file, "%d", gpio_pin);
fclose(unexport_file);
[ąÜčĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ C]
1. ąŻą║ą░ąČąĖč鹥 Cross-Compilation Tool. ąĪąĮą░čćą░ą╗ą░ ą▓ą░ą╝ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čāčéčī ą┤ąŠ čāčéąĖą╗ąĖčé ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (cross-compilation) ą▓ čüąĖčüč鹥ą╝ąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ PATH, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐čāčüą║ą░čéčī čāčéąĖą╗ąĖčéčŗ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖąĘ ą╗čÄą▒ąŠą│ąŠ ą╝ąĄčüčéą░. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā ą▓ čüą▓ąŠą╣ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čłąĄą╗ą╗ą░ (ąŠą▒čŗčćąĮąŠ čŹč鹊 čäą░ą╣ą╗ ~/.bashrc, ąĖą╗ąĖ ~/.bash_profile, ąĖą╗ąĖ ~/.zshrc, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ą░čłąĄą│ąŠ čłąĄą╗ą╗ą░). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐čāčéčī ą┐ąŠčüą╗ąĄ PATH= ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ arm-rockchip830-linux-uclibcgnueabihf-gcc. ąŁč鹊čé čäą░ą╣ą╗ ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░ą┐ą║ąĄ:
< ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ SDK>/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/
ą×čéą║čĆąŠą╣č鹥 ą▓ čĆąĄą┤ą░ą║č鹊čĆąĄ č鹥ą║čüčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čäą░ą╣ą╗ čłąĄą╗ą╗ą░:
ąöąŠą▒ą░ą▓čīč鹥 ą┐čāčéčī ą┤ąŠ čāčéąĖą╗ąĖčéčŗ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ą▓ čüąĖčüč鹥ą╝ąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ PATH čéą░ą║, čćč鹊ą▒čŗ ąŠąĮ ą▒čŗą╗ ą┐ąĄčĆą▓čŗą╝, čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘąĮą░ą║ą░ čĆą░ą▓ąĮąŠ. ą¤čĆąĖ čŹč鹊ą╝ ąĘą░ą╝ąĄąĮąĖč鹥 < SDK Directory> ąĮą░ čĆąĄą░ą╗čīąĮčŗą╣ ą┐čāčéčī ą▓ą░čłąĄą│ąŠ SDK, čéą░ą║ąŠą╣ ą║ą░ą║ /home/luckfox/luckfox-pico/.
export PATH=< SDK Directory>/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin:$PATH
ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘąĖč鹥 čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣:
2. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā čü ą┐ąŠą╝ąŠčēčīčÄ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░:
$ arm-rockchip830-linux-uclibcgnueabihf-gcc gpio.c -o gpio
3. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą▓ č鹥ą║čāčēąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą┐ąŠčÅą▓ąĖčéčüčÅ čäą░ą╣ą╗ gpio, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥.
4. ą¦č鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐čāčüčéąĖčéčī čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĄčæ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą▓ čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā ą┐ą╗ą░čéčŗ. ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī SCP, TFTP ąĖą╗ąĖ ADB.
ąÆąŠčé čéą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ ADB. ąĪą╗ąĄą┤čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą║ąŠą┐ąĖčĆčāąĄčé ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ gpio ą▓ ą║ą░čéą░ą╗ąŠą│ /oem/gpiotest ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ:
$ adb push gpio /oem/gpiotest
5. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĘą░ą┐čāčüčéąĖč鹥 čłąĄą╗ą╗ ą┐ą╗ą░čéčŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ ADB:
$ adb shell
[root@luckfox ~]# cd /oem/gpiotest
[root@luckfox gpiotest]# ls
gpio
ąśąĘą╝ąĄąĮąĖč鹥 ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čäą░ą╣ą╗ gpio, čćč鹊ą▒čŗ ąŠąĮ čüčéą░ą╗ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝:
[root@luckfox gpiotest]# chmod +x gpio
ąĪą╗ąĄą┤čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüčéąĖčé ąĮą░čłčā č鹥čüč鹊ą▓čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā:
[root@luckfox gpiotest]# ./gpio
Please enter the GPIO pin number: 55
1
0
1
0
1
[ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ Device Tree]
ąÆčŗą▓ąŠą┤čŗ 55 ąĖ 54 ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ą┐čĆčÅą╝čāčÄ ą▒ąĄąĘ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ device tree. ąĢčüą╗ąĖ ąĮą░ą╝ ąĮčāąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą║ą░ą║ general-purpose IO, č鹊 ąĮčāąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī device tree.
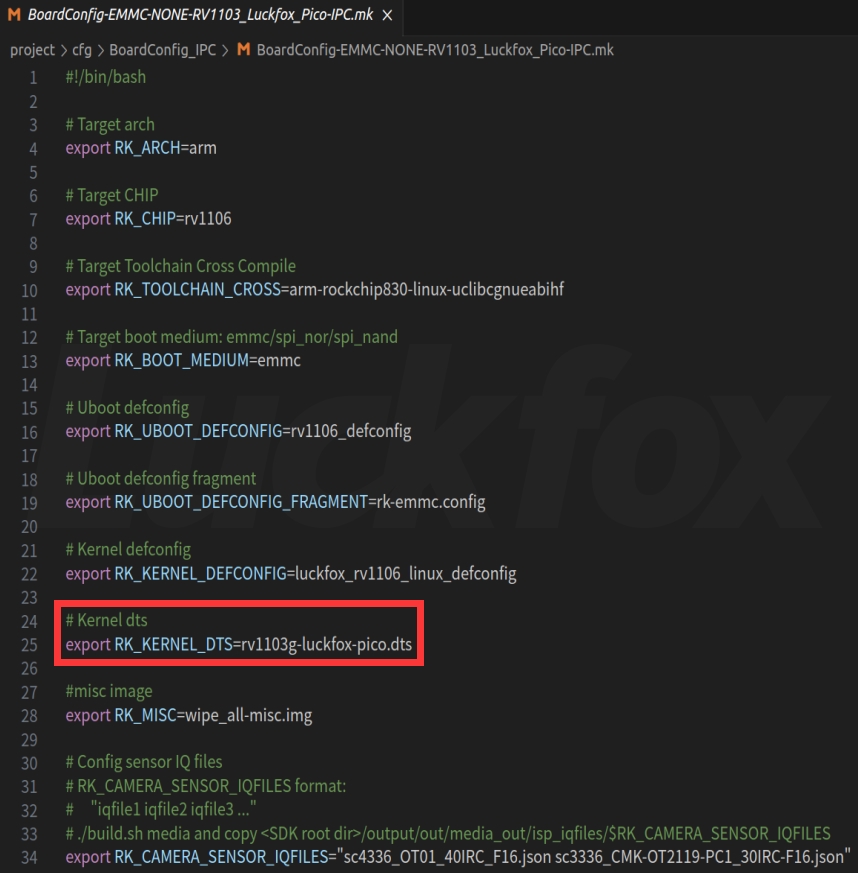
1. ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ čäą░ą╣ą╗ą░ Device Tree. ążą░ą╣ą╗čŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ *.mk čāčüčéčĆąŠą╣čüčéą▓ čĆą░ąĘąĮčŗčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą┐ą╗ą░čé SDK ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ < SDK directory>/project/cfg/BoardConfig_IPC:
luckfox-pico$ ls -1 project/cfg/BoardConfig_IPC
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_86Panel-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_86Panel_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Pi-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Pi_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Ultra-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Ultra_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Zero-IPC.mk
BoardConfig-EMMC-Busybox-RV1106_Luckfox_Pico_Ultra-IPC_FASTBOOT.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_Mini-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_Plus-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_WebBee-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_Mini-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_Plus-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_WebBee-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
BoardConfig-SPI_NAND-Busybox-RV1106_Luckfox_Pico_Pro_Max-IPC_FASTBOOT.mk
luckfox-buildroot-nocsi-oem-pre.sh
luckfox-buildroot-oem-pre.sh
luckfox-glibc-oem-pre.sh
luckfox-rv1106-tb-emmc-post.sh
luckfox-rv1106-tb-spi_nand-post.sh
luckfox-systemd-off-modem-post.sh
luckfox-userdata-pre.sh
overlay
ąŁčéąĖ čäą░ą╣ą╗čŗ čüąŠą┤ąĄčƹȹ░čé ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čĆą░ąĘąĮčŗčģ ą╝ąŠą┤ąĄą╗ąĄą╣ ą┐ą╗ą░čé Luckfox Pico, ąĮą░čüčéčĆą░ąĖą▓ą░čÅ čéą░ą║ąĖąĄ ąĖčģ ą░čüą┐ąĄą║čéčŗ, ą║ą░ą║ čåąĄą╗ąĄą▓ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ (target architecture), ąĘą░ą│čĆčāąĘąŠčćąĮčŗą╣ ąĮąŠčüąĖč鹥ą╗čī (boot medium), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (Uboot) ąĖ čÅą┤čĆą░ (kernel), ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆą░ąĘą┤ąĄą╗ąŠą▓ (partition settings). ąĪčéčĆčāą║čéčāčĆą░ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ SDK čüą╗ąĄą┤čāčÄčēą░čÅ:
Ōö£ŌöĆŌöĆ build.sh -> project/build.sh ---- čüą║čĆąĖą┐čé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ SDK
Ōö£ŌöĆŌöĆ media --------------------------- ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ Multimedia, ISP ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ
| (ą╝ąŠąČąĄčé ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą▓ SDK)
Ōö£ŌöĆŌöĆ sysdrv -------------------------- ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ U-Boot, kernel, rootfs (ą╝ąŠąČąĄčé
| ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą▓ SDK)
Ōö£ŌöĆŌöĆ project ------------------------- ąŠą▒čĆą░ąĘčåąŠą▓čŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ
| | ąĖ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ čüą║čĆąĖą┐č鹊ą▓
Ōöé Ōö£ŌöĆŌöĆ cfg
Ōöé Ōö£ŌöĆŌöĆ BoardConfig_IPC
Ōöé Ōö£ŌöĆŌöĆ BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk
Ōöé Ōö£ŌöĆŌöĆ BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico_Mini_A-IPC.mk
Ōöé Ōö£ŌöĆŌöĆ BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Mini_B-IPC.mk
Ōöé Ōö£ŌöĆŌöĆ BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Plus-IPC.mk
Ōöé Ōö£ŌöĆŌöĆ BoardConfig-SPI_NAND-NONE-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
Ōöé ŌööŌöĆŌöĆ ...
Ōö£ŌöĆŌöĆ output -------------------------- ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗčģ
| čäą░ą╣ą╗ąŠą▓ ąŠą▒čĆą░ąĘą░ SDK
Ōö£ŌöĆŌöĆ docs ---------------------------- ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ SDK
ŌööŌöĆŌöĆ tools --------------------------- čāčéąĖą╗ąĖčéčŗ čāą┐ą░ą║ąŠą▓ą║ąĖ ąŠą▒čĆą░ąĘą░ (packaging tools)
ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ (burning tools)
ąŁą║čüą┐ąŠčĆčéąĖčĆčāąĄą╝ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą║čĆčāąČąĄąĮąĖčÅ RK_KERNEL_DTS čāą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗ ąĖčüčģąŠą┤ąĮąĖą║ą░ ą┤ą╗čÅ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ (Device Tree Source, DTS), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čÅą┤čĆąŠ (kernel). ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ ą┐ą╗ą░čéčā Luckfox Pico ąĖ ąŠčéą║čĆčŗčéčī ąĄčæ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk, č鹊 ą╝čŗ ą╝ąŠąČąĄą╝ čāą▓ąĖą┤ąĄčéčī, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą║čĆčāąČąĄąĮąĖčÅ RK_KERNEL_DTS čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čäą░ą╣ą╗ rv1103g-luckfox-pico.dts (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ sysdrv/source/kernel/arch/arm/boot/dts ą║ąŠčĆąĮčÅ SDK).
2. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ GPIO. ą×ą▒čŗčćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ GPIO čéčĆąĄą▒čāąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓čāčģ čüąĄą║čåąĖą╣ ą║ąŠą┤ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąĮąŠą┐ą║ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 0, ąĖ ą▓čģąŠą┤ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą┐ąŠą┤čéčÅąČą║čā ą║ ą▓ąĄčĆčģąĮąĄą╝čā čāčĆąŠą▓ąĮčÄ (pull-up). ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ GPIO1_C7_d ą▓ device tree.
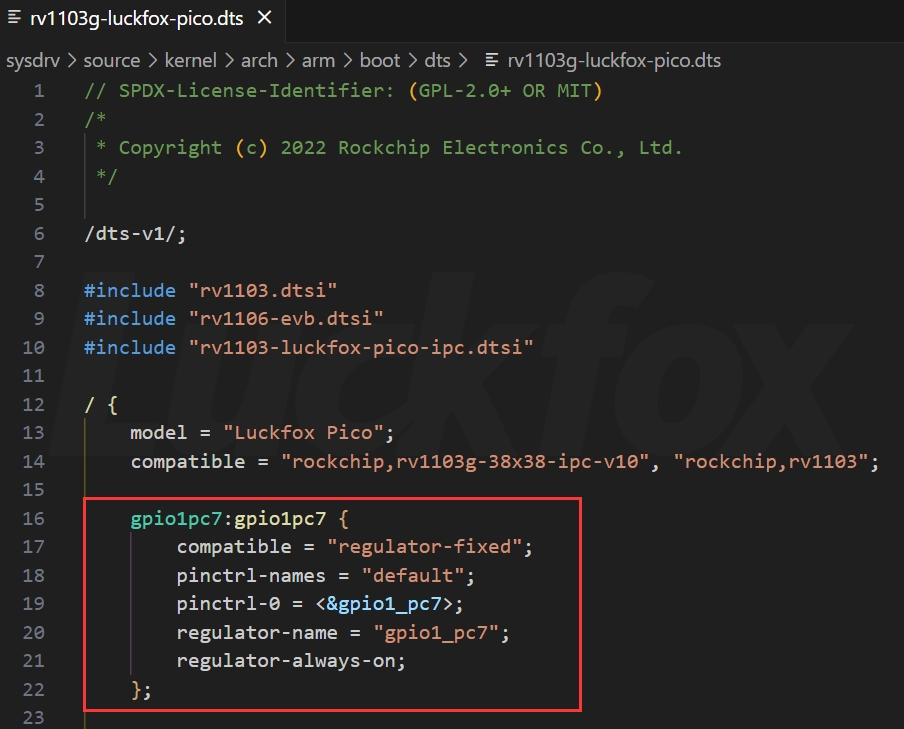
ąöąŠą▒ą░ą▓ą╗čÅąĄą╝čŗąĄ ą║čāčüą║ąĖ ą║ąŠą┤ą░:
/{
gpio1pc7:gpio1pc7 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = < &gpio1_pc7>;
regulator-name = "gpio1_pc7";
regulator-always-on;
};
};
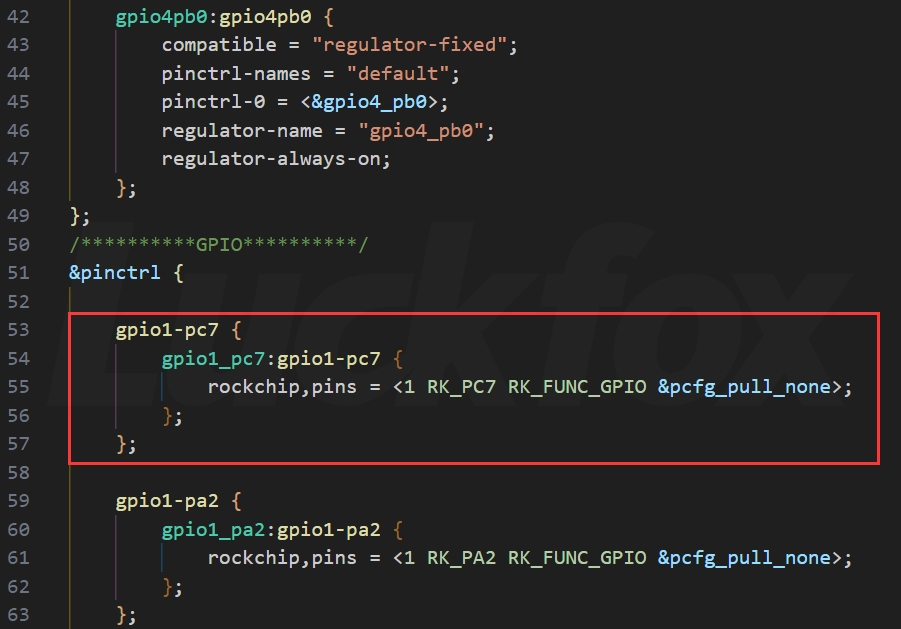
&pinctrl {
gpio1-pc7 {
gpio1_pc7:gpio1-pc7 {
rockchip,pins = < 1 RK_PC7 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
3. ąÜąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŚą░ą┐čĆąĄčé čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čāąĘą╗ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ čäą░ą╣ą╗ąĄ device tree. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ ąĘą░ą┐čĆąĄčéąĖčéčī čäčāąĮą║čåąĖčÄ ą©ąśą£ (PWM) ąĮą░ ą▓čŗą▓ąŠą┤ąĄ GPIO1_C7_d.
4. ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čÅą┤čĆą░. SDK ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ ą▓ąĄčéą▓ąĄą╣ ą┤ą╗čÅ LuckFox Pico, LuckFox Pico Mini A, LuckFox Pico Mini B, LuckFox Pico Plus ąĖ LuckFox Pico Pro/Max. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā, ąĖ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü ą▓čŗą▒ąŠčĆą░ ą┐ą╗ą░čéčŗ ą▓ą▓ąĄą┤ąĖč鹥 ąĄčæ ąĮąŠą╝ąĄčĆ ą▓ ą╝ąĄąĮčÄ:
~/luckfox-pico$ ./build.sh lunch
5. ąĀąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čÅą┤čĆą░:
~/luckfox-pico$ ./build.sh kernel
[ą¤ąŠą▓č鹊čĆąĮą░čÅ ą┐čĆąŠčłąĖą▓ą║ą░ firmware]
1. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ kernel čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ < SDK directory>/output/image.
$ ls output/image/
boot.img download.bin env.img idblock.img oem.img rootfs.img sd_update.txt
tftp_update.txt uboot.img update.img userdata.img
2. ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čü ą║ą░čĆčéčŗ ąĘą░ąĮąŠą▓ąŠ čüąŠąĘą┤ą░ą╣č鹥 ą║ą░čĆčéčā SD. ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖąĘ SPI NAND FLASH ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā ą┐čĆąŠčłąĖą▓ą║ąĖ:
$ cd output/image/
$ sudo upgrade_tool uf update.img
[ąĪčüčŗą╗ą║ąĖ]
1. LuckFox Pico GPIO site:wiki.luckfox.com. |



