|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]) ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąŠą▒ą╝ąĄąĮą░ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ąŠ čłąĖąĮąĄ SPI ąĮą░ čüą╗ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÉčĆčģąĖą▓ čü ą║ąŠą┤ąŠą╝ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü Google-ą┤ąĖčüą║ą░ ąÉčĆčģąĖą▓ čü ą║ąŠą┤ąŠą╝ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü Google-ą┤ąĖčüą║ą░ (čüą╝. čüčüčŗą╗ą║čā ąĮą░ Code.zip ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]).
[1. ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ SPI]
ąÆ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Linux ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ SPI ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą║ą╗čÄč湥ą▓ąŠą╣ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą║ąŠąĮčéčĆąŠą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ č湥čĆąĄąĘ čłąĖąĮčā SPI. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ąŠą┤čüąĖčüč鹥ą╝ąĄ SPI ą╝ąŠąČąĮąŠ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ą║ą░čéą░ą╗ąŠą│čā < Linux kernel source>/Documentation/spi.
ąÜą╗čÄč湥ą▓čŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ SPI:
ŌĆó ąśąĮč鹥čĆč乥ą╣čü sysfs: ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ SPI ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĮą░ą▒ąŠčĆąŠą╝ čäą░ą╣ą╗ąŠą▓ ąĖ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ č湥čĆąĄąĘ čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā sysfs, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗčģ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čłąĖąĮ SPI ąĖ čāčüčéčĆąŠą╣čüčéą▓ SPI. ąŁčéąĖ čäą░ą╣ą╗čŗ ąĖ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ąŠą▒čŗčćąĮąŠ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ą░čģ /sys/class/spi_master ąĖ /sys/bus/spi/devices, ą┤ą░ą▓ą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čéčī ąĖ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čüą▓ąŠą╣čüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ SPI.
[root@luckfox ]# ls /sys/class/spi_master
spi2
[root@luckfox ]# ls /sys/bus/spi/devices
spi2.0
ŌĆó Device Nodes: ą║ą░ąČą┤ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI čüąŠąĘą┤ą░ąĄčé device ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ /dev, čĆą░ąĘčĆąĄčłą░čÅ ąŠą▒ą╝ąĄąĮ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čĆą░ą▒ąŠč湥ą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user-space) čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čäą░ą╣ą╗ąŠą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ą×ą▒čŗčćąĮąŠ čŹčéąĖ device nodes ąĖą╝ąĄčÄčé ąĖą╝ąĄąĮą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ /dev/spidevX.Y, ą│ą┤ąĄ X ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ čłąĖąĮčŗ SPI, ą░ Y ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
[2. ą¤čĆąŠčüą╝ąŠčéčĆ SPI č湥čĆąĄąĘ čłąĄą╗ą╗]
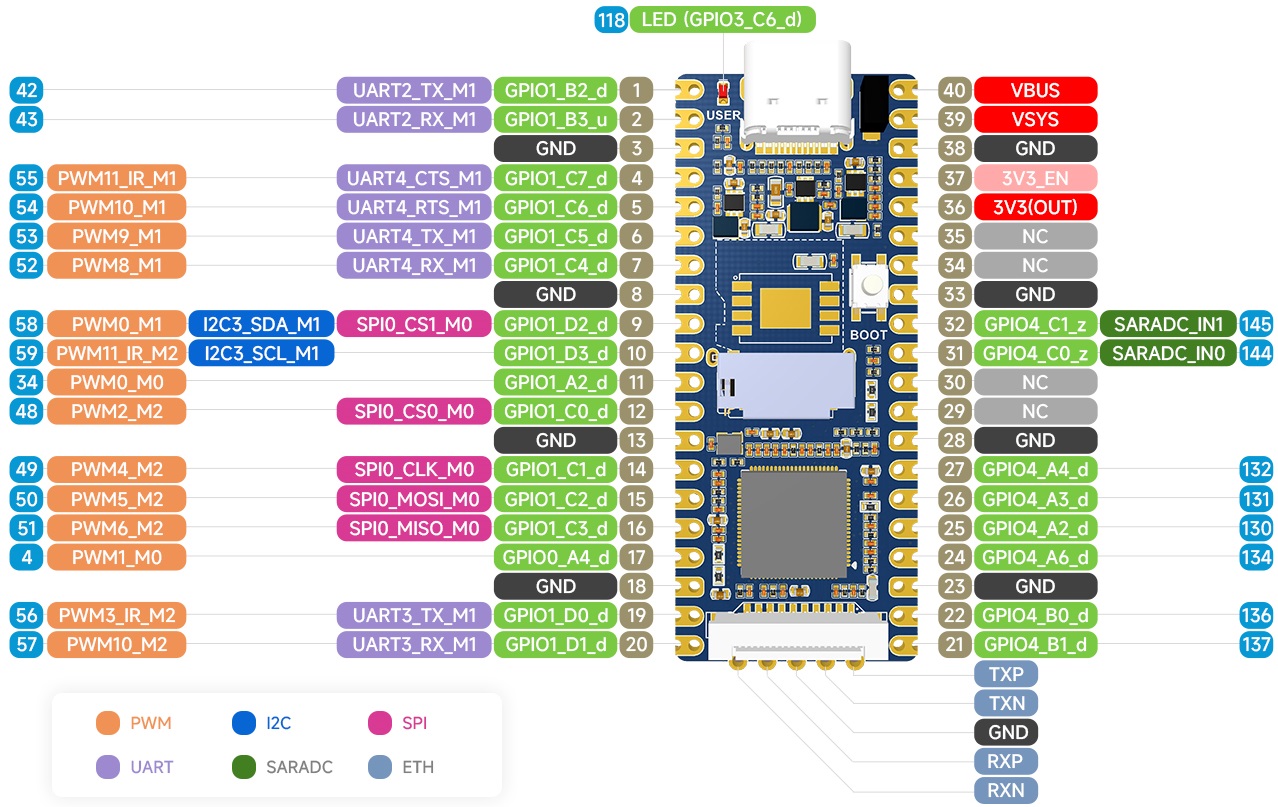
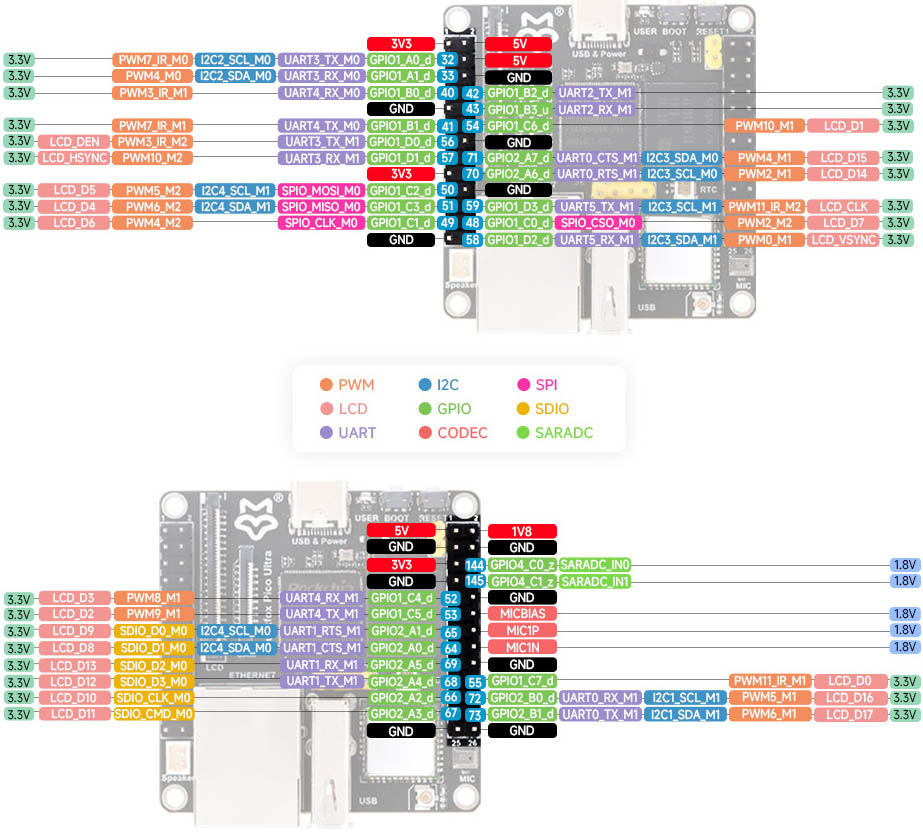
2.1. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ą╗ą░čéčŗ. ąØą░ ą┐ą╗ą░čéą░čģ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ąŠą▒čŗčćąĮąŠ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘčĆąĄčłąĄąĮ ąĖąĮč鹥čĆč乥ą╣čü SPI0. ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▓čŗą▓ąŠą┤čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠ ą║ą░čĆčéąĖąĮą║ą░ą╝, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗą╝ ąĮąĖąČąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čā LuckFox Pico ąĖąĮč鹥čĆč乥ą╣čü SPI0 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąŠą╝ąĄčĆą░ą╝ ą▓čŗą▓ąŠą┤ąŠą▓ 48, 49, 50, 51 ąĖ 58 (ą▓čŗą▓ąŠą┤ 58 ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ).
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ LuckFox Pico:
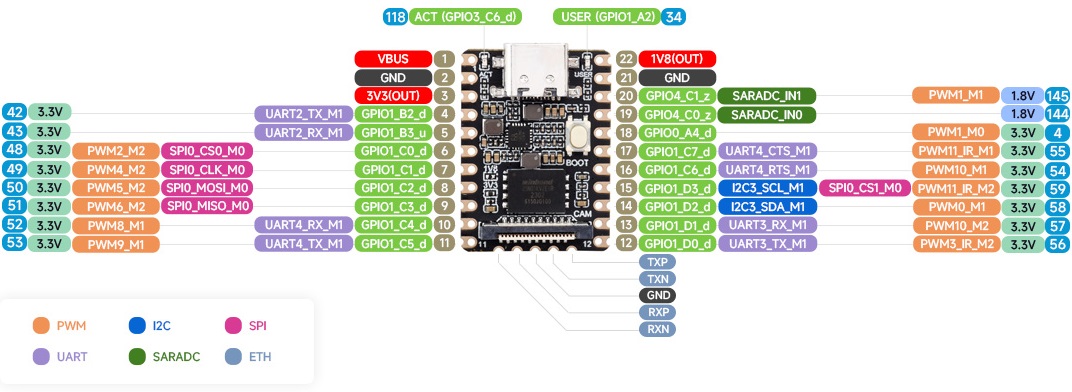
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ LuckFox Pico Mini A/B:
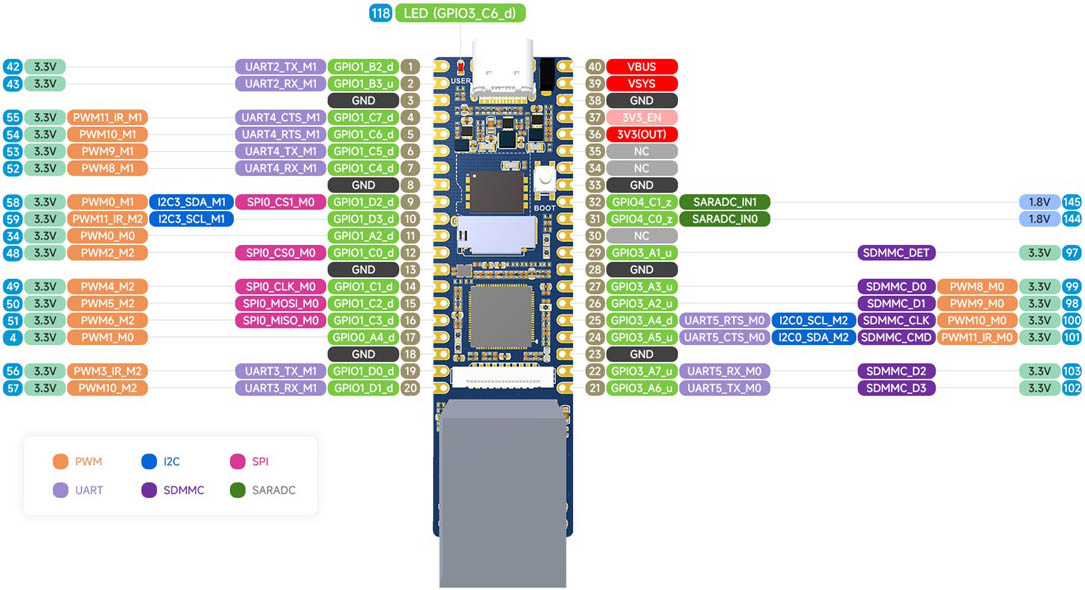
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ LuckFox Pico Plus:
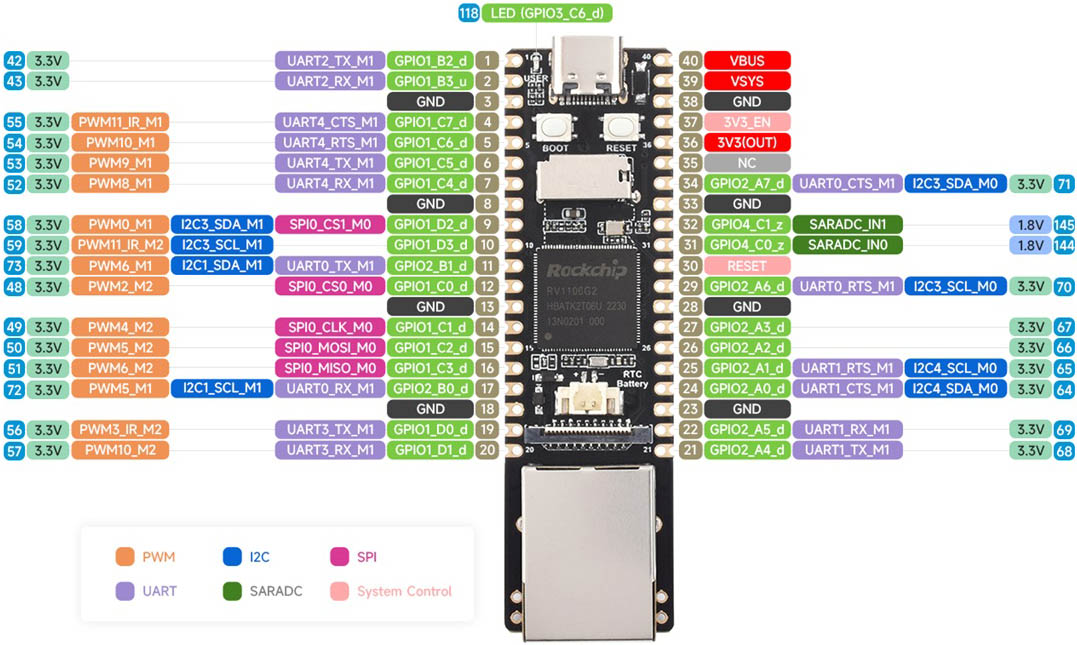
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ LuckFox Pico Pro/Max:
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ LuckFox Pico Ultra/Ultra W:
2.2. ą¤čĆąŠčüą╝ąŠčéčĆ čāčüčéčĆąŠą╣čüčéą▓. ąÆ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ /sys/bus/spi/devices čā ą║ą░ąČą┤ąŠą│ąŠ SPI-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĄčüčéčī čüą▓ąŠčÅ ąŠčéą┤ąĄą╗čīąĮą░čÅ ą┐ą░ą┐ą║ą░. ąŁčéąĖ ą┐ą░ą┐ą║ąĖ ą▓ čüą▓ąŠąĄą╝ ąĖą╝ąĄąĮąĖ ąŠą▒čŗčćąĮąŠ čüąŠą┤ąĄčƹȹ░čé "spi" ąĖ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, /sys/bus/spi/devices/spi0.0 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ 0 ąĮą░ SPI-čłąĖąĮąĄ 0. ąöą╗čÅ ą┐čĆąŠčüą╝ąŠčéčĆą░ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓ čüąĖčüč鹥ą╝ąĄ čłąĖąĮ SPI ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ls:
# ls /sys/bus/spi/devices/
spi2.0 spi0.0
[3. SPI-ąŠą▒ą╝ąĄąĮ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ Python]
3.1. ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ SPI.
import spidev
def main():
tx_buffer = [ord(char) for char in "hello world!"]
rx_buffer = [0] * len(tx_buffer)
try:
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000
rx_buffer = spi.xfer2(tx_buffer[:])
print("tx_buffer:\n\r", ''.join(map(chr, tx_buffer)))
print("rx_buffer:\n\r", ''.join(map(chr, rx_buffer)))
except Exception as e:
print(f"An error occurred: {e}")
finally:
if spi:
spi.close()
if __name__ == "__main__":
main()
3.2. ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI. ą¤ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ą▓čŗčłąĄ ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ą╗ą░čüčü SpiDev ąĖąĘ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ spidev ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąŠą▒čŖąĄą║čéą░ SPI. ąÆ ą▓čŗąĘąŠą▓ąĄ ą╝ąĄč鹊ą┤ą░ open čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čłąĖąĮčŗ SPI ąĖ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ SPI bus 0 ąĖ device 0. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ SPI čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 1000000 ąōčå, čé. ąĄ. 1 ą£ąōčå. ąØą░ čŹč鹊ą╝ čłą░ą│ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ą░ąĘąŠą▓čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ.
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000
3.3. ą¤čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą┤ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą│ąŠ ą▓čŗčłąĄ ą┐čĆąĖą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄč鹊ą┤ xfer2 ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ SPI. ąŚą┤ąĄčüčī tx_buffer čŹč鹊 ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą░ ą▓ rx_buffer ą▒čāą┤čāčé čüąŠčģčĆą░ąĮčÅčéčīčüčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ tx_buffer ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝, ą▓ xfer2 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ąŠą┐ąĖčÅ, čé. ąĄ. tx_buffer[:]. ąś ąĮą░ą║ąŠąĮąĄčå, ąŠą┐ąĄčĆą░č鹊čĆ print ą▓čŗą▓ąŠą┤ąĖčé ą▓ ą╗ąŠą│ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą║ą░ą║ čüčéčĆąŠą║ąĖ, čćč鹊ą▒čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠą│ čü ąĮąĖą╝ąĖ ąŠąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ.
rx_buffer = spi.xfer2(tx_buffer[:])
print("tx_buffer:\n\r", ''.join(map(chr, tx_buffer)))
print("rx_buffer:\n\r", ''.join(map(chr, rx_buffer)))
3.4. ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 č鹥ą║čüč鹊ą▓čŗą╣ čĆąĄą┤ą░ą║č鹊čĆ vi (ąĖą╗ąĖ nano), čćč鹊ą▒čŗ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī č鹥ą║čüčé ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą▓čüčéą░ą▓ąĖčéčī ąĄą│ąŠ ą▓ čäą░ą╣ą╗. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąŠčģčĆą░ąĮąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā ą║ą░ą║ čäą░ą╣ą╗ i2c.py.
ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
ąĪąŠąĄą┤ąĖąĮąĖč鹥 ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓čŗą▓ąŠą┤čŗ MOSI ąĖ MISO ąĖąĮč鹥čĆč乥ą╣čüą░ SPI ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąÆčŗ čāą▓ąĖą┤ąĖč鹥 čéą░ą║ąŠą╣ ą╗ąŠą│:
# python3 i2c.py
tx_buffer:
hello world!
rx_buffer:
hello world!
[4. SPI-ąŠą▒ą╝ąĄąĮ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ C]
4.1. ążčāąĮą║čåąĖčÅ ioctl. ą¤čĆąĖ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čäčāąĮą║čåąĖčÅ ioctl ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ SPI. ą¤čĆąŠč鹊čéąĖą┐ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāčÄčēąĖą╣:
#include < sys/ioctl.h>
int ioctl(int fd, unsigned long request, ...);
ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ioctl ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ č湥čĆąĄąĘ SPI, ąŠą▒čŗčćąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą┐čĆąŠčüą░:
SPI_IOC_RD_MODE: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ č鹥ą║čāčēąĄą│ąŠ čĆąĄąČąĖą╝ą░ ąŠą▒ą╝ąĄąĮą░ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čćąĖčéą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čĆąĄąČąĖą╝ą░ ą▓ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ č鹥ą║čāčēąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĖ čäą░ąĘčŗ SPI (CPOL ąĖ CPHA).
SPI_IOC_WR_MODE: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆąĄąČąĖą╝ą░ ąŠą▒ą╝ąĄąĮą░ SPI. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĖąĘ ą┤ą▓čāčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čåąĖčäčĆ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĖ čäą░ąĘčŗ ąŠą▒ą╝ąĄąĮą░ SPI.
SPI_IOC_RD_BITS_PER_WORD: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ.
SPI_IOC_WR_BITS_PER_WORD: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čćč鹊ą▒čŗ čāą║ą░ąĘą░čéčī čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüą╗ąŠą▓ą░ ą▓ ą▒ąĖčéą░čģ.
SPI_IOC_RD_MAX_SPEED_HZ: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ (čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓) čłąĖąĮčŗ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čüčćąĖčéčŗą▓ą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą║ąŠčĆąŠčüčéąĖ ą▓ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ.
SPI_IOC_WR_MAX_SPEED_HZ: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ SPI. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čłąĖąĮčŗ SPI.
SPI_IOC_MESSAGE(N): ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┐ąŠ čłąĖąĮąĄ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čéčĆąĄą▒čāąĄčé čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą╝ą░čüčüąĖą▓ 菹╗ąĄą╝ąĄąĮč鹊ą▓ čüčéčĆčāą║čéčāčĆ spi_ioc_transfer, ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐ąĄčĆą░čåąĖą╣.
4.2. ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ SPI ąĮą░ čÅąĘčŗą║ąĄ C.
#include < stdio.h>
#include < stdlib.h>
#include < stdint.h>
#include < fcntl.h>
#include < unistd.h>
#include < linux/spi/spidev.h>
#include < sys/ioctl.h>
#define SPI_DEVICE_PATH "/dev/spidev0.0"
int main()
{
int spi_file;
uint8_t tx_buffer[50] = "hello world!";
uint8_t rx_buffer[50];
// ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ SPI ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ:
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
// ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI:
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(tx_buffer),
.delay_usecs = 0,
.speed_hz = 1000000, // čüą║ąŠčĆąŠčüčéčī SPI ą▓ ąōčå
.bits_per_word = 8, };
if (ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to perform SPI transfer");
close(spi_file);
return -1;
}
// ąÆčŗą▓ąŠą┤ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░:
printf("\rtx_buffer: \n %s\n ", tx_buffer);
printf("\rrx_buffer: \n %s\n ", rx_buffer);
// ąŚą░ą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
close(spi_file);
return 0;
}
4.3. ążą░ą╣ą╗ąŠą▓čŗąĄ ą┐čāčéąĖ. ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čüčéčĆąŠą║ąĄ ą║ąŠą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ą░ą║čĆąŠčü, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┐čāčéąĖ ą║ čäą░ą╣ą╗čā čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
#define SPI_DEVICE_PATH "/dev/spidev0.0"
4.4. ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ ą║ąŠą┤ą░ ą┤ąĄą╗ą░ąĄčé ą┐ąŠą┐čŗčéą║čā ąŠčéą║čĆčŗčéčī čāą║ą░ąĘą░ąĮąĮčŗą╣ čäą░ą╣ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
4.5. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ SPI. ąŁč鹊čé ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ąŠą▒ą╝ąĄąĮą░ SPI Mode 0 (ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ 0, čäą░ąĘą░ čéą░ą║č鹊ą▓ 0) ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆą░ąĘą╝ąĄčĆą░ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ 8 ą▒ąĖčé. ąŁč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠčĆčĆąĄą║čéąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ SPI.
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
ąÆ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ čéąĖą┐ą░ spi_ioc_transfer čü ąĖą╝ąĄąĮąĄą╝ transfer ąĘą░ą┤ą░čÄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI. ąŻą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą░ą┤čĆąĄčüą░ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░, ą┤ą╗ąĖąĮą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ą░čģ, čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI ą▓ ąōąĄčĆčåą░čģ ąĖ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ ą▓ SPI_IOC_MESSAGE čäčāąĮą║čåąĖąĖ ioctl, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░čüčī čéčĆą░ąĮąĘą░ą║čåąĖčÅ SPI.
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(tx_buffer),
.delay_usecs = 0,
.speed_hz = 1000000, // čüą║ąŠčĆąŠčüčéčī SPI ą▓ ąōčå
.bits_per_word = 8,
};
4.6. ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čäčāąĮą║čåąĖčÄ ioctl ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI. ąŻą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéčĆą░ąĮąĘą░ą║čåąĖą╣ čćąĖčüą╗ąŠą╝ 1 čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ą░ą║čĆąŠčüą░ SPI_IOC_MESSAGE(1), čü čéčĆąĄčéčīąĖą╝ ą░čĆą│čāą╝ąĄąĮč鹊ą╝, čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╝ ąĮą░ ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ spi_ioc_transfer. ąĢčüą╗ąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅ SPI ąŠą║ą░ąĘą░ą╗ą░čüčī ąĮąĄčāą┤ą░čćąĮąŠą╣, č鹊 ą┐ąĄčćą░čéą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čäą░ą╣ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
if (ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to perform SPI transfer");
close(spi_file);
return -1;
}
4.7. ąÜčĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ. ą¤čĆąŠčåąĄčüčü ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ čģąŠčüč鹥, ą│ą┤ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ SDK LuckFox [].
1. ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (Cross-Compilation Tool).
ąĪąĮą░čćą░ą╗ą░ ą▓ą░ą╝ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čāčéčī ą┤ąŠ čāčéąĖą╗ąĖčé ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐čāčüą║ą░čéčī čŹčéąĖ čāčéąĖą╗ąĖčéčŗ ąĖąĘ ą╗čÄą▒ąŠą╣ ą┐ą░ą┐ą║ąĖ ąĮą░ ą┤ąĖčüą║ąĄ. ąÆčŗ ą╝ąŠąČąĄč鹥 čüą┤ąĄą╗ą░čéčī čŹč鹊, ą┤ąŠą▒ą░ą▓ąĖą▓ čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā čü čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ą░čłąĄą│ąŠ čłąĄą╗ą╗ą░ (ąŠą▒čŗčćąĮąŠ ~/.bashrc, ąĖą╗ąĖ ~/.bash_profile, ąĖą╗ąĖ ~/.zshrc, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąŠą╣ čłąĄą╗ą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ), ą╗ąĖą▒ąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą▓ čüą║čĆąĖą┐čé, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ą░ąĄčé 菹║čüą┐ąŠčĆčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH. ą×ą▒ą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐čāčéčī ą┤ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čüčéą░ą▓ą╗ąĄąĮ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ PATH=.
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 SDK ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐čĆąŠčäąĖą╗ąĄ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą▓ ą┐ą░ą┐ą║ąĄ ą┐ąŠ ą░ą▒čüąŠą╗čÄčéąĮąŠą╝čā ą┐čāčéąĖ /home/username/luckfox-pico, č鹊ą│ą┤ą░ čüčéčĆąŠą║ą░ 菹║čüą┐ąŠčĆčéą░ ą┤ąŠą╗ąČąĮą░ ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
export PATH=/home/username/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin:$PATH
ąĢčüą╗ąĖ ą▓čŗ ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ čŹčéčā čüčéčĆąŠą║čā ą▓ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čłąĄą╗ą╗ą░, č鹊 ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖč鹥 čłąĄą╗ą╗ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
2. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ spi.c ą║ąŠą╝ą░ąĮą┤ąŠą╣:
$ arm-rockchip830-linux-uclibcgnueabihf-gcc spi.c -o spi
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą▓ čäą░ą╣ą╗ąĄ spi ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĮą░ ą▓ą░čłąĄą╣ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥 LuckFox.
4.8. ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ą┐ą╗ą░č鹥 LuckFox.
1. ą¤ąĄčĆąĄą┤ą░čćą░ čäą░ą╣ą╗ą░. ąĪąĮą░čćą░ą╗ą░ ąĮą░ą╝ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī čäą░ą╣ą╗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą┐ą░ą╝čÅčéčī ą┐ą╗ą░čéčŗ LuckFox. ą¤ąĄčĆąĄą┤ą░čéčī čäą░ą╣ą╗ ą╝ąŠąČąĮąŠ č湥čĆąĄąĘ TFTP ąĖą╗ąĖ ADB. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čäą░ą╣ą╗ą░ spi ą▓ ą║ą░čéą░ą╗ąŠą│ ą┐ą╗ą░čéčŗ /oem/spitest čü ą┐ąŠą╝ąŠčēčīčÄ ADB:
$ adb push ./spi /oem/spitest
2. ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĘą░ą┐čāčüčéąĖč鹥 čłąĄą╗ą╗ ąĮą░ ą┐ą╗ą░č鹥, ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ą║ čäą░ą╣ą╗čā ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā:
$ adb shell
# cd ~/spitest
# pwd
/oem/spitest
# chmod 777 spi
# ./spi
ąŚą░ą┐čāčēąĄąĮąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą▓ąĄą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣ ą╗ąŠą│:
# ./spi
tx_buffer:
hello world!
rx_buffer:
hello world!
[5. ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ Device Tree]
ąśąĮč鹥čĆč乥ą╣čü SPI ąĖąĘąĮą░čćą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ čäą░ą╣ą╗ą░čģ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ SDK, čéą░ą║ čćč鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ. ą×ą┤ąĮą░ą║ąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖąĘą╝ąĄąĮąĖčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą▓čŗą▓ąŠą┤ąŠą▓ SPI, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą┤ą░ą╗ąĄąĄ. ąÜąŠą│ą┤ą░ č湥čĆąĄąĘ SPI ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓, ą▓čŗ ą╝ąŠąČąĄč鹥 ą▓čŗą▒čĆą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ CS ą║ą░ą║ ą┐ąŠčĆčé GPIO, ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čāčĆąŠą▓ąĮąĄą╝ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ CS. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗ ą╝ąŠąČąĄč鹥 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī GPIO1_C0_d ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░ (general-purpose IO, GPIO).
5.1. ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ čäą░ą╣ą╗ą░ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓.
1. ążą░ą╣ą╗čŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ ą▓čüąĄčģ ą┐ą╗ą░čé ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ:
< SDK directory>/project/cfg/BoardConfig_IPC/
ąÜą░ąČą┤čŗą╣ *.mk čäą░ą╣ą╗ ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą┐ą╗ą░čéčŗ Luckfox Pico, čéą░ą║ąĖąĄ ą║ą░ą║ čåąĄą╗ąĄą▓ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ (target architecture), ąĘą░ą│čĆčāąĘąŠčćąĮčŗą╣ ąĮąŠčüąĖč鹥ą╗čī (boot medium), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ (Uboot), čÅą┤čĆąŠ (kernel) ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą▒ą╗ąĖčåčŗ čĆą░ąĘą┤ąĄą╗ąŠą▓ (partition settings).
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RK_KERNEL_DTS čäą░ą╣ą╗ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ą╗ą░čéčŗ čāą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ (Device Tree Source, DTS) ą┤ą╗čÅ čÅą┤čĆą░. ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ Luckfox Pico ąĖ ąŠčéą║čĆčŗčéčī ąĄą│ąŠ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk, č鹊 ą╝čŗ čāą▓ąĖą┤ąĖą╝, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RK_KERNEL_DTS čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čäą░ą╣ą╗ rv1103g-luckfox-pico.dts.
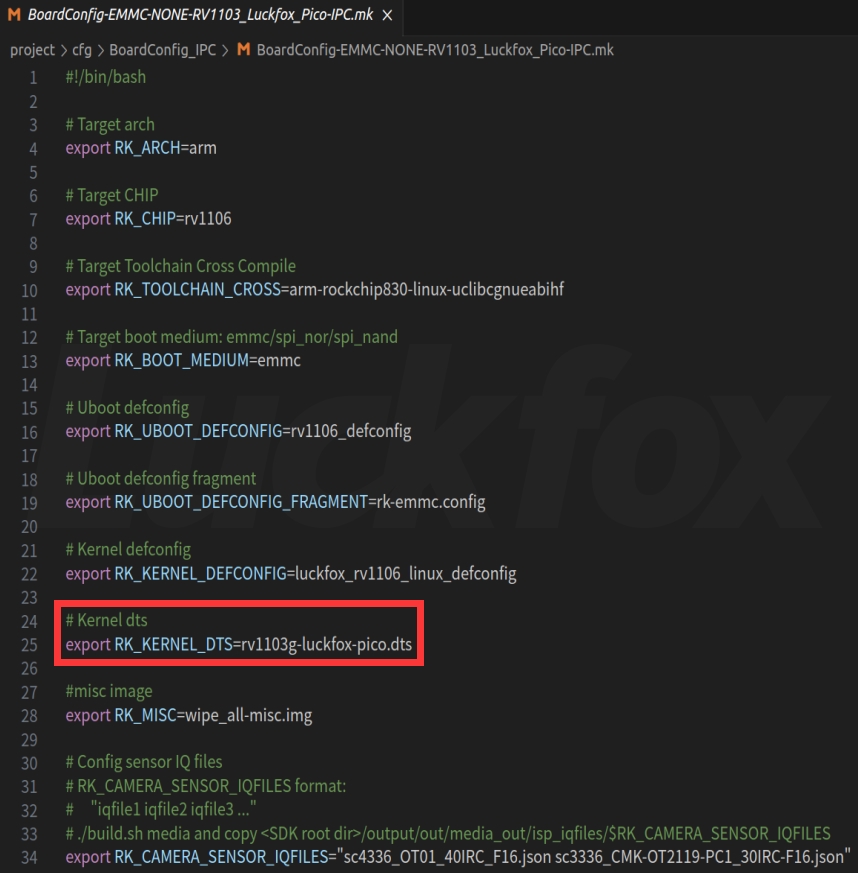
ą×čüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ RK_KERNEL_DTS, ą┐čāčéčī čäą░ą╣ą╗ą░ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą╗ą░čéčŗ Luckfox Pico ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
< SDK directory>/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts
2. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ GPIO. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ąŠą▒čŗčćąĮąŠ čéčĆąĄą▒čāąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓čāčģ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą║ąŠą┤ą░ ą▓ čäą░ą╣ą╗ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ GPIO1_C0_d:
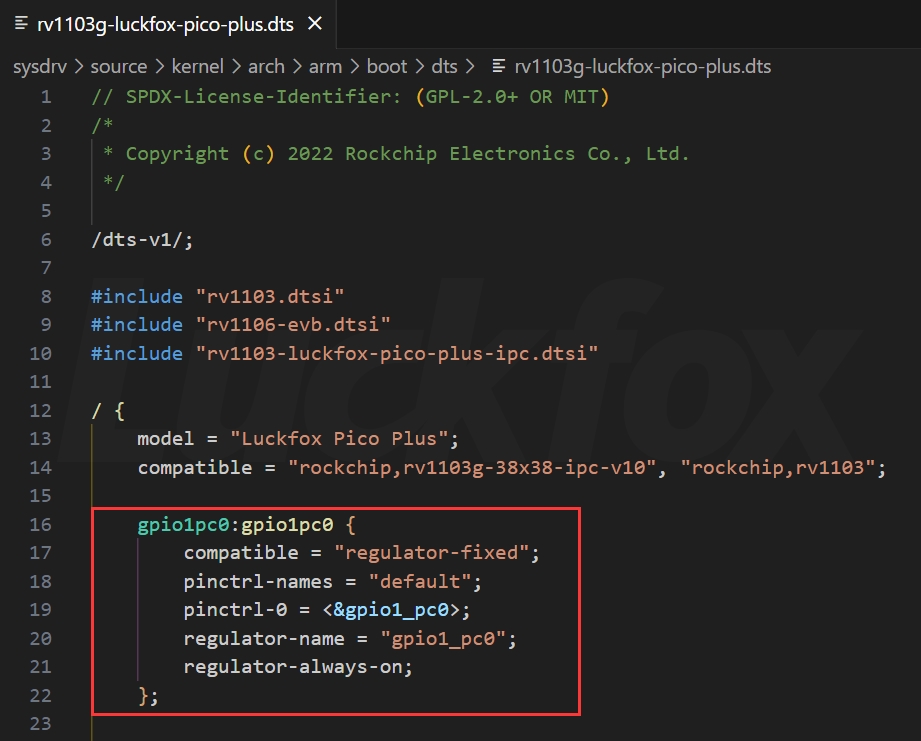
ąŚą┤ąĄčüčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą│ą╝ąĄąĮčéčŗ ą║ąŠą┤ą░:
/{
gpio1pc:gpio1pc0 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = < &gpio1_pc0>;
regulator-name = "gpio1_pc0";
regulator-always-on;
};
};
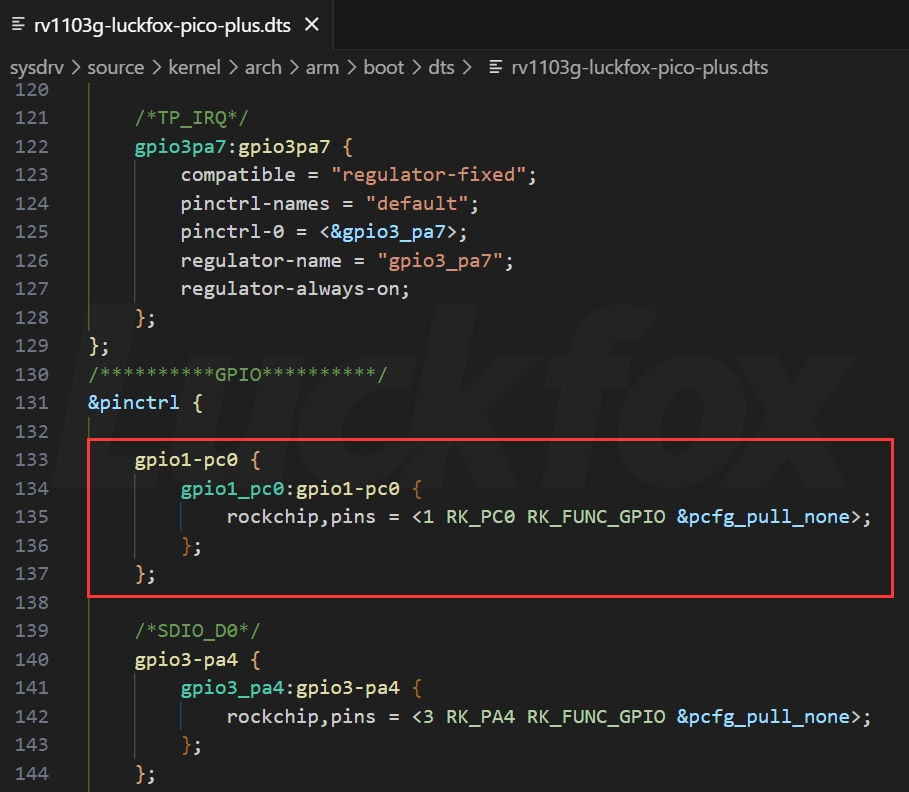
&pinctrl {
gpio1-pc0 {
gpio1_pc0:gpio1-pc0 {
rockchip,pins = < 1 RK_PC0 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
3. ąÜąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čåąŠą║ąŠą╗ąĄą▓ą║ąŠą╣ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ (čüą╝. ą▓čŗčłąĄ ą║ą░čĆčéąĖąĮą║ąĖ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "2.1. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ą╗ą░čéčŗ") ą▓čŗ ą╝ąŠąČąĄč鹥 ąŠą▒ąĮą░čĆčāąČąĖčéčī, čćč鹊 ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ GPIO1_C0_d ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░ąĘąĮą░č湥ąĮą░ čäčāąĮą║čåąĖčÅ PWM. ąØąŠ ą▓ čüą▓ąŠąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą╝čŗ čģąŠčéąĖą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ą░ą║ GPIO, čéą░ą║ čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ ąĘą░ą┐čĆąĄčéąĖčéčī čäčāąĮą║čåąĖčÄ PWM ą▓čŗą▓ąŠą┤ą░ GPIO1_C0_d ą▓ čäą░ą╣ą╗ąĄ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓:
// &pwm2 {
// status = "okay"
// pinctrl-names = "active"
// pinctrl-0 = < &pwm2m2_pins>;
// };
4. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ SPI. ąśąĮč鹥čĆč乥ą╣čü SPI0 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čäą░ą╣ą╗ą░čģ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ SDK. ąŚą┤ąĄčüčī ą╝čŗ ąĮąĄ ą▒čāą┤ąĄą╝ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī GPIO1_C0_d ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗą▓ąŠą┤ą░ CS ą┤ą╗čÅ SPI0 (čüą╝. ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čüčéčĆąŠą║ąĄ 167). ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ SPI ą▓ ą┤ąĄčĆąĄą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓:
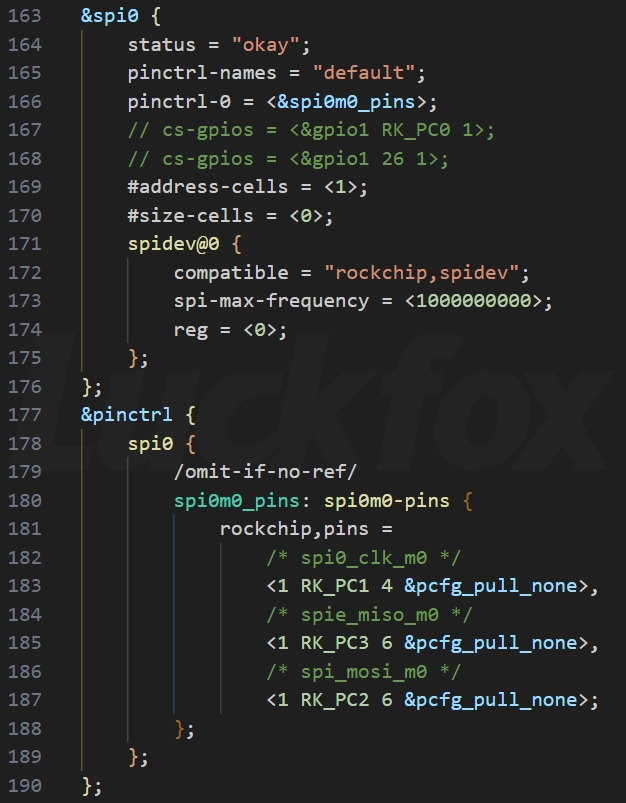
ąöąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╣ čüąĄą│ą╝ąĄąĮčé ą║ąŠą┤ą░:
&pinctrl {
spi0 {
/omit-if-no-ref/
spi0m0_pins: spi0m0-pins {
rockchip,pins =
/* spi0_clk_m0 */
< 1 RK_PC1 4 &pcfg_pull_none>,
/* spie_miso_m0 */
< 1 RK_PC3 6 &pcfg_pull_none>,
/* spi_mosi_m0 */
< 1 RK_PC2 6 &pcfg_pull_none>;
};
};
};
5.2. ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ Kernel
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▒ąŠčĆąŠą╝ ą▓ ą╝ąĄąĮčÄ čüą║čĆąĖą┐čéą░ ./build.sh lunch ąŠą┤ąĮąŠą╣ ąĖąĘ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┤ą╗čÅ ą┐ą╗ą░čé LuckFox Pico, LuckFox Pico Mini A, LuckFox Pico Mini B, LuckFox Pico Plus ąĖ LuckFox Pico Pro/Max:
~/luckfox-pico$ ./build.sh lunch
ls: cannot access 'BoardConfig*.mk': No such file or directory
You're building on Linux
Lunch menu...pick a combo:
BoardConfig-*.mk naming rules:
BoardConfig-"Boot Media"-"Power Plan"-"Hardware Version"-"Application Scenario".mk
BoardConfig-"boot medium"-"power solution"-"hardware version"-"applicaton".mk
----------------------------------------------------------------
0. BoardConfig_IPC/BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk
boot medium: EMMC
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
1. BoardConfig_IPC/BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico_Mini_A-IPC.mk
boot medium: EMMC
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Mini_A
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
2. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Mini_B-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Mini_B
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
3. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Plus-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Plus
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
4. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1106_Luckfox_Pico_Pro_Max
applicaton (scenario): IPC
----------------------------------------------------------------
Which would you like? [0]: 0
[build.sh:info] switching to board: /home/luckfox/luckfox-pico/project/cfg/BoardConfig_IPC/
BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk
[build.sh:info] Running build_select_board succeeded.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą▓ą░čĆąĖą░ąĮčé 0, čé. ąĄ. ą┐ą╗ą░čéą░ Luckfox Pico.
2. ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 čÅą┤čĆąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
~/luckfox-pico$ ./build.sh kernel
5.3. ą¤ąŠą▓č鹊čĆąĮą░čÅ ą┐čĆąŠčłąĖą▓ą║ą░ firmware.
1. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅą┤čĆąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąŠ, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ą▒čāą┤čāčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ < SDK directory>/output/image:
~/luckfox-pico$ ls -1 output/image/
boot.img
download.bin
env.img
idblock.img
oem.img
rootfs.img
sd_update.txt
tftp_update.txt
uboot.img
update.img
userdata.img
2. ąŚą░ą╝ąĄąĮąĖč鹥 čäą░ą╣ą╗čŗ boot.img ąĖ env.txt ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ firmware.
3. ąŚą░ąĮąŠą▓ąŠ čüąŠąĘą┤ą░ą╣č鹥 ąĘą░ą│čĆčāąĘąŠčćąĮčāčÄ SD-ą║ą░čĆčéčā. ąöą╗čÅ Luckfox Pico Plus ą▓ą░ą╝ ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┐ąŠą╝ąĄąĮčÅčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆą░ąĘą┤ąĄą╗.
[ąĪčüčŗą╗ą║ąĖ]
1. LuckFox SPI Communication application layer site:wiki.luckfox.com.
2. LuckFox SPI: ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Master ąĖ Slave. |



