|
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT (Remote Control Transceiver) ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ąĖąĮčäčĆą░ą║čĆą░čüąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ ą│ąĖą▒ą║ąŠčüčéąĖ čüą▓ąŠąĄą│ąŠ č乊čĆą╝ą░čéą░ ą┤ą░ąĮąĮčŗčģ RMT ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮ ą┤ąŠ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą│ąŠ ą╝ąĮąŠą│ąĖąĄ ą┤čĆčāą│ąĖąĄ čéąĖą┐čŗ čüąĖą│ąĮą░ą╗ąŠą▓. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čüąĄč鹥ą▓ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüčĆąĄą┤čüčéą▓ą░ RMT čüąŠą┤ąĄčƹȹ░čé ą║ą░ą║ čäąĖąĘąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, čéą░ą║ ąĖ ą║ą░ąĮą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī. ążąĖąĘąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüčĆąĄą┤čā čüą▓čÅąĘąĖ ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖč鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąŻčĆąŠą▓ąĄąĮčī ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č乊čĆą╝ą░čé ą║ą░ą┤čĆą░ RMT. ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ą▒ą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░ą┤čĆąĄ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖą╝ą▓ąŠą╗ąŠą╝ RMT, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ čéąĖą┐ąŠą╝ rmt_symbol_word_t ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ.
ESP32-C3 cąŠą┤ąĄčƹȹĖčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ RMT(1). ąÜą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ ą╝ąŠąČąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖą▒ąŠ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║, ą╗ąĖą▒ąŠ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮąĖą║.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čĆą░ąĘąĮčŗąĄ čéąĖą┐čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüąĄčĆąĖąĖ ESP ą╝ąŠą│čāčé čüąŠą┤ąĄčƹȹ░čéčī ąĮą░ ą▒ąŠčĆčéčā čĆą░ąĘąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ RMT. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā (TRM) ąĮą░ čüą▓ąŠą╣ čćąĖą┐ ESP. ąöčĆą░ą╣ą▓ąĄčĆ ąĮąĄ ąĘą░ą┐čĆąĄčēą░ąĄčé ą▓ą░ą╝ ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ RMT, ąĮąŠ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ąŠčłąĖą▒ą║ą░, ą║ąŠą│ą┤ą░ ąĘą░ą║ąŠąĮčćą░čéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čĆąĄčüčāčĆčüčŗ. ą¤ąŠčŹč鹊ą╝čā ą▓čüąĄą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅą╣č鹥 ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ API ą┤čĆą░ą╣ą▓ąĄčĆą░.
ą×ą▒čŗčćąĮąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüčåąĄąĮą░čĆąĖčÅčģ:
ŌĆó ą¤ąĄčĆąĄą┤ą░čćą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ infrared-čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠ ą╗čÄą▒ąŠą╝čā IR-ą┐čĆąŠč鹊ą║ąŠą╗čā, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠč鹊ą║ąŠą╗čā NEC (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą┤ą░ą╗ąĄąĄ).
ŌĆó ą×ą▒čŗčćąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ.
ŌĆó ą¤ąĄčĆąĄą┤ą░čćą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠ-čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╝ čåąĖą║ą╗ąĄ, ą║ąŠąĮąĄčćąĮąŠąĄ ąĖą╗ąĖ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ.
ŌĆó ą£ąĮąŠą│ąŠą║ą░ąĮą░ą╗čīąĮą░čÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░.
ŌĆó ą£ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄčüčāčēčāčÄ ą┤ą╗čÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĖą╗ąĖ ą┤ąĄą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄčüčāčēčāčÄ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
[ąĀą░ąĘą╝ąĄčéą║ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT]
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ RMT ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ą░ąĮąĮčŗąĄ čüą▓ąŠąĖą╝ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ čłą░ą▒ą╗ąŠąĮąŠą╝ - čüąĖą╝ą▓ąŠą╗ RMT. ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąŠą╗čÅ ą▒ąĖčé čüąĖą╝ą▓ąŠą╗ą░ RMT. ąÜą░ąČą┤čŗą╣ čüąĖą╝ą▓ąŠą╗ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ ą┐ą░čĆ ą┤ą▓čāčģ ąĘąĮą░č湥ąĮąĖą╣. ą¤ąĄčĆą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą┐ą░čĆąĄ čŹč鹊 15-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĄąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ą▓ čéąĖą║ą░čģ RMT. ąÆč鹊čĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą┐ą░čĆąĄ ąŠą┤ąĮąŠą▒ąĖčéąĮąŠąĄ, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĄąĄ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░, čé. ąĄ. ą╗ąŠą│. 1 ąĖą╗ąĖ ą╗ąŠą│. 0.
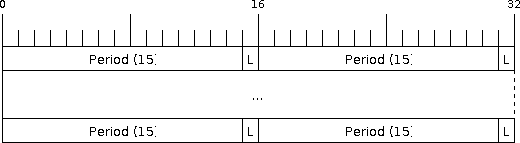
ąĀąĖčü. 1. ąĪčéčĆčāą║čéčāčĆą░ čüąĖą╝ą▓ąŠą╗ą░ RMT. ąŚą┤ąĄčüčī L čŹč鹊 čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ (signal level).
[ą×ą▒ąĘąŠčĆ RMT-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░]
ąĀą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (data path) ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control path) ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (RMT TX channel) ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ą░čĆčéąĖąĮą║ąĄ:
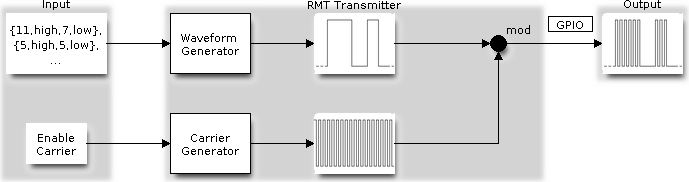
ąĀąĖčü. 2. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ RMT.
ąöčĆą░ą╣ą▓ąĄčĆ ą║ąŠą┤ąĖčĆčāąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ č乊čĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ RMT, ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ RMT ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣. ą×ąĮ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąĮąĄčüčāčēąĄą╣ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠąĮ ą▒čāą┤ąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮ ąĮą░ ąĮąŠąČą║čā ą┐ąŠčĆčéą░ GPIO.
[ą×ą▒ąĘąŠčĆ RMT-ą┐čĆąĖąĄą╝ąĮąĖą║ą░]
ąĀą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (data path) ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control path) ą║ą░ąĮą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ (RMT RX channel) ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ą░čĆčéąĖąĮą║ąĄ:
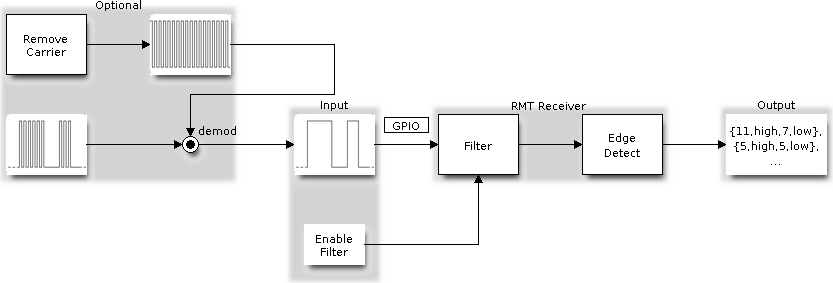
ąĀąĖčü. 3. ą¤čĆąĖąĄą╝ąĮąĖą║ RMT.
ą¤čĆąĖąĄą╝ąĮąĖą║ RMT ą╝ąŠąČąĄčé ąŠčåąĖčäčĆąŠą▓čŗą▓ą░čéčī ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ č乊čĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ RMT ąĖ čüąŠčģčĆą░ąĮčÅčéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéčī. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čāą║ą░ąĘą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║čā ą▒ą░ąĘąŠą▓čŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ą╝ąŠąČąĮąŠ čĆą░čüą┐ąŠąĘąĮą░čéčī čüąŠą▒čŗčéąĖąĄ ąŠčüčéą░ąĮąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░, ąĖ ą╝ąŠąČąĮąŠ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī ą┐ąŠą╝ąĄčģąĖ ąĖ čłčāą╝. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ąĄą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮąŠą╣ ąĮąĄčüčāčēąĄą╣ ąĖąĘ ą▒ą░ąĘąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
[ą×ą▒ąĘąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ RMT]
ą×ą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ RMT čĆą░ąĘą┤ąĄą╗ąĄąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ:
ŌĆó ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓ (Resource Allocation) - ąĘą┤ąĄčüčī čĆą░čüą║čĆčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą▓čŗą┤ąĄą╗čÅčéčī ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ąĮą░ą╗čŗ RMT. ąóą░ą║ąČąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čéčī ą║ą░ąĮą░ą╗čŗ ąĖ ą┤čĆčāą│ąĖąĄ čĆąĄčüčāčĆčüčŗ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĮčŗ.
ŌĆó ą£ąŠą┤čāą╗čÅčåąĖčÅ ąĖ ą┤ąĄą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĮąĄčüčāčēąĄą╣ (Carrier Modulation and Demodulation) - ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ąĖ ą┤ąĄą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ ąĮąĄčüčāčēąĄą╣ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ TX ąĖ RX čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ŌĆó ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ Event Callbacks - čĆą░čüą║čĆčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ callback-čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ą║ą░ąĮą░ą╗ą░ RMT.
ŌĆó ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖ ąĘą░ą┐čĆąĄčé ą║ą░ąĮą░ą╗ą░ - ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čĆą░ąĘčĆąĄčłą░čéčī ąĖ ąĘą░ą┐čĆąĄčēą░čéčī ą║ą░ąĮą░ą╗ RMT.
ŌĆó ąśąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ TX - ąŠą┐ąĖčüą░ąĮčŗ čłą░ą│ąĖ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ TX.
ŌĆó ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ - ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ čüąŠą▒čĆą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ą▓ čüąĖąĮčģčĆąŠąĮąĮčāčÄ ą│čĆčāą┐ą┐čā, čćč鹊ą▒čŗ ąĖčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐čāčüą║ą░ą╗ąĖčüčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ŌĆó ąśąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ RX - ąŠą┐ąĖčüą░ąĮčŗ čłą░ą│ąĖ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RX.
ŌĆó RMT Encoder - č乊ą║čāčüąĖčĆąŠą▓ą║ą░ ąĮą░ č鹊ą╝, ą║ą░ą║ ąĮą░ą┐ąĖčüą░čéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ąĄčĆ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮčŗčģ ą║ąŠą┤ąĄčĆąŠą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
ŌĆó Power Management - ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ čĆą░ąĘąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą╗ąĖčÅčÄčé ąĮą░ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ.
ŌĆó Cache Safe - ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĘą░ą┐čĆąĄčéąĖčéčī ą▓ą╗ąĖčÅąĮąĖąĄ ą║čŹčēą░ ąĮą░ ą┤čĆą░ą╣ą▓ąĄčĆ RMT, ąĖ čüąŠą▓ąĄčéčŗ ą┐ąŠ čüą╝čÅą│č湥ąĮąĖčÄ čŹč鹊ą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
ŌĆó Thread Safety - ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąŠ, ą║ą░ą║ąĖąĄ API ą▓čŗąĘąŠą▓čŗ ą│ą░čĆą░ąĮčéąĖčĆčāčÄčé ą▒ąĄąĘąŠą┐ą░čüąĮčāčÄ čĆą░ą▒ąŠčéčā ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą╝ąĮąŠą│ąŠą┐ąŠč鹊čćąĮąŠčüčéąĖ.
ŌĆó Kconfig Options - ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąŠą┐čåąĖąĖ Kconfig, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ RMT.
[ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓]
ą×ą▒ą░ ą▓ąĖą┤ą░ ą║ą░ąĮą░ą╗ąŠą▓ RMT, TX ąĖ RX, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ čéąĖą┐ąŠą╝ rmt_channel_handle_t. ąöčĆą░ą╣ą▓ąĄčĆ ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé, ą║ą░ą║ąĖąĄ ą║ą░ąĮą░ą╗čŗ ą┤ąŠčüčéčāą┐ąĮčŗ, ąĖ ą▓čŗą┤ą░ąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ą║ą░ąĮą░ą╗ ą┐ąŠ ąĘą░ą┐čĆąŠčüčā.
ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ą░ąĮą░ą╗ą░ RMT TX. ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ą░ąĮą░ą╗ą░ RMT TX čüčāčēąĄčüčéą▓čāąĄčé čüčéčĆčāą║čéčāčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░: rmt_tx_channel_config_t. ąØąĖąČąĄ ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
rmt_tx_channel_config_t::gpio_num čāčüčéą░ąĮąŠą▓ąĖčé ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ GPIO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝.
rmt_tx_channel_config_t::clk_src ą▓čŗą▒ąĖčĆą░ąĄčé ąĖčüč鹊čćąĮąĖą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT. ąöąŠčüčéčāą┐ąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ rmt_clock_source_t. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆčāą│ąĖą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ, ąĖ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ: ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒čāą┤ąĄčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ ąŠąĮąĖ, TX ąĖą╗ąĖ RX. ąÜą░ą║ ą▓ą╗ąĖčÅąĄčé ąĮą░ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, čüą╝. čüąĄą║čåąĖčÄ Power Management.
rmt_tx_channel_config_t::resolution_hz čāčüčéą░ąĮąŠą▓ąĖčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ą░ RMT ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ čéąĖą║ą░.
rmt_tx_channel_config_t::mem_block_symbols čüą╝čŗčüą╗ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, čĆą░ąĘčĆąĄčłąĄąĮ ą╗ąĖ DMA backend, ąĖą╗ąĖ ąĮąĄčé.
- ąĄčüą╗ąĖ DMA čĆą░ąĘčĆąĄčłąĄąĮ č湥čĆąĄąĘ rmt_tx_channel_config_t::with_dma, č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▒čāč乥čĆą░ DMA. ą¦č鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ą╗čāčćčłąĄą╣ ą┐čĆąŠą┐čāčüą║ąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖ čāą╝ąĄąĮčīčłąĖčéčī ąĮą░ą│čĆčāąĘą║čā ąĮą░ CPU, ą▓čŗ ą╝ąŠąČąĄč鹥 čāčüčéą░ąĮąŠą▓ąĖčéčī ąĘą┤ąĄčüčī čāą▓ąĄą╗ąĖč湥ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ 1024.
- ąĄčüą╗ąĖ DMA ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čŹč鹊 ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╝ ą▓ą╗ą░ą┤ąĄąĄčé ą║ą░ąĮą░ą╗, ąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąĄ ą╝ąĄąĮąĄąĄ 48.
rmt_tx_channel_config_t::trans_queue_depth čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą│ą╗čāą▒ąĖąĮčā ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠč湥čĆąĄą┤ąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą¦ąĄą╝ ą│ą╗čāą▒ąČąĄ ąŠč湥čĆąĄą┤čī, č鹥ą╝ ą▒ąŠą╗čīčłąĄ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąŠ ą▓ backlog.
rmt_tx_channel_config_t::invert_out ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖčÅ, ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░čéčī ą╗ąĖ čüąĖą│ąĮą░ą╗ RMT ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĄą│ąŠ ąĮą░ ą▓čŗą▓ąŠą┤ GPIO.
rmt_tx_channel_config_t::with_dma čĆą░ąĘčĆąĄčłą░ąĄčé DMA backend ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ DMA ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮčÅčéčī čü CPU ąĮą░ą│čĆčāąĘą║čā ą┐ąŠ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÄ ą║ą░ąĮą░ą╗ą░. ą×ą┤ąĮą░ą║ąŠ DMA ą┤ąŠčüčéčāą┐ąĄąĮ ąĮąĄ ąĮą░ ą▓čüąĄčģ čćąĖą┐ą░čģ ESP, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čĆą░ąĘčĆąĄčłą░čéčī čŹčéčā ąŠą┐čåąĖčÄ. ąśąĮą░č湥 ą▓čŗ ą╝ąŠąČąĄč鹥 čüč鹊ą╗ą║ąĮčāčéčīčüčÅ čü ąŠčłąĖą▒ą║ąŠą╣ ESP_ERR_NOT_SUPPORTED.
rmt_tx_channel_config_t::intr_priority čāčüčéą░ąĮąŠą▓ąĖčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ 0, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čü ąĮąĖąĘą║ąĖą╝ ąĖą╗ąĖ čüčĆąĄą┤ąĮąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ (čāčĆąŠą▓ąĄąĮčī ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĮąĖą╝ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ 1, 2 ąĖą╗ąĖ 3), ąĖąĮą░č湥 ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čćąĖčüą╗ąŠą▓čāčÄ č乊čĆą╝čā (1, 2, 3), ąĮąŠ ąĮąĄ ą▒ąĖč鹊ą▓čāčÄ ą╝ą░čüą║čā ((1 < < 1), (1 < < 2), (1 < < 3)). ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čāą┤ą░ą╗ąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ą▓čŗąĘąŠą▓ąŠą╝ rmt_del_channel().
rmt_tx_channel_config_t::allow_pd čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ čüąĖčüč鹥ą╝ąĄ ą▓čŗą║ą╗čÄčćą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ light sleep mode. ą¤ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ sleep čüąĖčüč鹥ą╝ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą║ąŠąĮč鹥ą║čüčé čĆąĄą│ąĖčüčéčĆą░ RMT, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠąĘąČąĄ, ą║ąŠą│ą┤ą░ čüąĖčüč鹥ą╝ą░ ą▓čŗą╣ą┤ąĄčé ąĖąĘ sleep mode. ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▒ąŠą╗čīčłąĄ 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ, ąĮąŠ čåąĄąĮąŠą╣ ą▒ąŠą╗čīčłąĄą│ąŠ čĆą░čüčģąŠą┤ą░ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ čĆąĄą│ąĖčüčéčĆą░. ąŁč鹊 ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ. ąŁčéą░ ąŠą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čäčāąĮą║čåąĖąĖ, ąĄčüą╗ąĖ ą▓čŗ ą▓ą║ą╗čÄčćąĖč鹥 ąĄąĄ ąĮą░ ąĮąĄą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╝ čćąĖą┐ąĄ, ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄ čāą┤ą░ąĄčéčüčÅ ąŠčéą║ą╗čÄčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ light sleep.
ąÜąŠą│ą┤ą░ čüčéčĆčāą║čéčāčĆą░ rmt_tx_channel_config_t ąĘą░ą┐ąŠą╗ąĮąĄąĮą░ ą▓ą░ąČąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī rmt_new_tx_channel(), čćč鹊ą▒čŗ ą▓čŗą┤ąĄą╗ąĖčéčī ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą║ą░ąĮą░ą╗ TX. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░ RMT, ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĘą░ą┐čāčüčéąĖą╗čüčÅ ą║ąŠčĆčĆąĄą║čéąĮąŠ. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą║ąŠą│ą┤ą░ ą▓ ą┐čāą╗ąĄ čĆąĄčüčāčĆčüąŠą▓ RMT ą▒ąŠą╗čīčłąĄ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓, čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąŠčłąĖą▒ą║čā ESP_ERR_NOT_FOUND. ąĢčüą╗ąĖ ą║ą░ą║ą░čÅ-ą╗ąĖą▒ąŠ čäąĖčćą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ DMA) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąŠčłąĖą▒ą║čā ESP_ERR_NOT_SUPPORTED.
rmt_channel_handle_t tx_chan = NULL;
rmt_tx_channel_config_t tx_chan_config = {
.clk_src = RMT_CLK_SRC_DEFAULT, // ą▓čŗą▒ąŠčĆ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
.gpio_num = 0, // ąĮąŠą╝ąĄčĆ GPIO
.mem_block_symbols = 64, // čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ 64 * 4 = 256 ą▒ą░ą╣čé
.resolution_hz = 1 * 1000 * 1000, // čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čéąĖą║ą░ 1 ą£ąōčå,
// čé. ąĄ. 1 čéąĖą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 1 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ąĄ
.trans_queue_depth = 4, // čāčüčéą░ąĮąŠą▓ąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéčĆą░ąĮąĘą░ą║čåąĖą╣, ą║ąŠč鹊čĆąŠąĄ
// ą╝ąŠąČąĄčé ąŠąČąĖą┤ą░čéčī ą▓ č乊ąĮąĄ
.flags.invert_out = false, // ąĮąĄ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗
.flags.with_dma = false, // ąĮąĄ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī DMA
};
ESP_ERROR_CHECK(rmt_new_tx_channel(&tx_chan_config, &tx_chan));
ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ą░ąĮą░ą╗ą░ RMT RX. ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ą░ąĮą░ą╗ą░ RMT RX ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐ąŠą╗ąĮąĖčéčī čüčéčĆčāą║čéčāčĆčā rmt_rx_channel_config_t. ąØąĖąČąĄ ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
rmt_rx_channel_config_t::gpio_num čāčüčéą░ąĮąŠą▓ąĖčé ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ GPIO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝.
rmt_rx_channel_config_t::clk_src ą▓čŗą▒ąĖčĆą░ąĄčé ąĖčüč鹊čćąĮąĖą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT. ąöąŠčüčéčāą┐ąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ rmt_clock_source_t. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆčāą│ąĖą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ, ąĖ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ: ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒čāą┤ąĄčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ ąŠąĮąĖ, TX ąĖą╗ąĖ RX. ąÜą░ą║ ą▓ą╗ąĖčÅąĄčé ąĮą░ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, čüą╝. čüąĄą║čåąĖčÄ Power Management.
rmt_rx_channel_config_t::resolution_hz čāčüčéą░ąĮąŠą▓ąĖčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ą░ RMT ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ čéąĖą║ą░.
rmt_rx_channel_config_t::mem_block_symbols čüą╝čŗčüą╗ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, čĆą░ąĘčĆąĄčłąĄąĮ ą╗ąĖ DMA backend, ąĖą╗ąĖ ąĮąĄčé.
- ąĄčüą╗ąĖ DMA čĆą░ąĘčĆąĄčłąĄąĮ č湥čĆąĄąĘ rmt_rx_channel_config_t::with_dma, č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▒čāč乥čĆą░ DMA.
- ąĄčüą╗ąĖ DMA ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čŹč鹊 ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╝ ą▓ą╗ą░ą┤ąĄąĄčé ą║ą░ąĮą░ą╗, ąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąĄ ą╝ąĄąĮąĄąĄ 48.
rmt_rx_channel_config_t::invert_in ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖąĮą▓ąĄčĆčüąĖąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠąĮ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ RMT. ąśąĮą▓ąĄčĆčüąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą╝ą░čéčĆąĖčåąĄą╣ GPIO matrix ą▓ą╝ąĄčüč鹊 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ RMT.
rmt_rx_channel_config_t::with_dma čĆą░ąĘčĆąĄčłą░ąĄčé DMA ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ DMA ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮčÅčéčī čü CPU ąĮą░ą│čĆčāąĘą║čā ą┐ąŠ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÄ ą║ą░ąĮą░ą╗ą░. ą×ą┤ąĮą░ą║ąŠ DMA ą┤ąŠčüčéčāą┐ąĄąĮ ąĮąĄ ąĮą░ ą▓čüąĄčģ čćąĖą┐ą░čģ ESP, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čĆą░ąĘčĆąĄčłą░čéčī čŹčéčā ąŠą┐čåąĖčÄ. ąśąĮą░č湥 ą▓čŗ ą╝ąŠąČąĄč鹥 čüč鹊ą╗ą║ąĮčāčéčīčüčÅ čü ąŠčłąĖą▒ą║ąŠą╣ ESP_ERR_NOT_SUPPORTED.
rmt_rx_channel_config_t::intr_priority čāčüčéą░ąĮąŠą▓ąĖčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ 0, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čü ąĮąĖąĘą║ąĖą╝ ąĖą╗ąĖ čüčĆąĄą┤ąĮąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ (čāčĆąŠą▓ąĄąĮčī ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĮąĖą╝ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ 1, 2 ąĖą╗ąĖ 3), ąĖąĮą░č湥 ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čćąĖčüą╗ąŠą▓čāčÄ č乊čĆą╝čā (1, 2, 3), ąĮąŠ ąĮąĄ ą▒ąĖč鹊ą▓čāčÄ ą╝ą░čüą║čā ((1 < < 1), (1 < < 2), (1 < < 3)). ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čāą┤ą░ą╗ąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ą▓čŗąĘąŠą▓ąŠą╝ rmt_del_channel().
rmt_rx_channel_config_t::allow_pd čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ čüąĖčüč鹥ą╝ąĄ ą▓čŗą║ą╗čÄčćą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ light sleep mode. ą¤ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ sleep čüąĖčüč鹥ą╝ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą║ąŠąĮč鹥ą║čüčé čĆąĄą│ąĖčüčéčĆą░ RMT, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠąĘąČąĄ, ą║ąŠą│ą┤ą░ čüąĖčüč鹥ą╝ą░ ą▓čŗą╣ą┤ąĄčé ąĖąĘ sleep mode. ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▒ąŠą╗čīčłąĄ 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ, ąĮąŠ čåąĄąĮąŠą╣ ą▒ąŠą╗čīčłąĄą│ąŠ čĆą░čüčģąŠą┤ą░ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ čĆąĄą│ąĖčüčéčĆą░. ąŁč鹊 ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ. ąŁčéą░ ąŠą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čäčāąĮą║čåąĖąĖ, ąĄčüą╗ąĖ ą▓čŗ ą▓ą║ą╗čÄčćąĖč鹥 ąĄąĄ ąĮą░ ąĮąĄą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╝ čćąĖą┐ąĄ, ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄ čāą┤ą░ąĄčéčüčÅ ąŠčéą║ą╗čÄčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ light sleep.
ąÜąŠą│ą┤ą░ čüčéčĆčāą║čéčāčĆą░ rmt_rx_channel_config_t ąĘą░ą┐ąŠą╗ąĮąĄąĮą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą▓čŗąĘą▓ą░čéčī rmt_new_rx_channel(), čćč鹊ą▒čŗ ą▓čŗą┤ąĄą╗ąĖčéčī ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą║ą░ąĮą░ą╗ RX. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░ RMT, ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĘą░ą┐čāčüčéąĖą╗čüčÅ ą║ąŠčĆčĆąĄą║čéąĮąŠ. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą║ąŠą│ą┤ą░ ą▓ ą┐čāą╗ąĄ čĆąĄčüčāčĆčüąŠą▓ RMT ą▒ąŠą╗čīčłąĄ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓, čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąŠčłąĖą▒ą║čā ESP_ERR_NOT_FOUND. ąĢčüą╗ąĖ ą║ą░ą║ą░čÅ-ą╗ąĖą▒ąŠ čäąĖčćą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ DMA) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąŠčłąĖą▒ą║čā ESP_ERR_NOT_SUPPORTED.
rmt_channel_handle_t rx_chan = NULL;
rmt_rx_channel_config_t rx_chan_config = {
.clk_src = RMT_CLK_SRC_DEFAULT, // ą▓čŗą▒ąŠčĆ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
.resolution_hz = 1 * 1000 * 1000, // čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čéąĖą║ą░ 1 ą£ąōčå,
// čé. ąĄ. 1 čéąĖą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 1 ą╝ą║čü
.mem_block_symbols = 64, // čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ 64 * 4 = 256 ą▒ą░ą╣čé
.gpio_num = 2, // ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ GPIO
.flags.invert_in = false, // ąĮąĄ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░čéčī ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗
.flags.with_dma = false, // ąĮąĄ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī DMA backend
};
ESP_ERROR_CHECK(rmt_new_rx_channel(&rx_chan_config, &rx_chan));
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čŗą┤ąĄą╗ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ RMT, ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą│čĆčāą┐ą┐čŗ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ąŚą░č鹥ą╝ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗą▒ąĄčĆąĄčé ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąŠčé ąĮąĖąĘą║ąŠą│ąŠ ą┤ąŠ ą▓čŗčüąŠą║ąŠą│ąŠ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ąŠąĮčäą╗ąĖą║čéą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐čĆąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, ą▓čŗą┤ąĄą╗čÅą╣č鹥 ą║ą░ąĮą░ą╗čŗ ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ ą┐čĆąĖ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, čĆą░čüą┐čĆąĄą┤ąĄą╗čÅą╣č鹥 ą║ą░ąĮą░ą╗čŗ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ąĖčģ čåąĄą╗ąĄą▓ąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ, ą╗ąĖą▒ąŠ ąŠčé čüą░ą╝ąŠą│ąŠ ą▓čŗčüąŠą║ąŠą│ąŠ ą║ čüą░ą╝ąŠą╝čā ąĮąĖąĘą║ąŠą╝čā, ą╗ąĖą▒ąŠ ąŠčé čüą░ą╝ąŠą│ąŠ ąĮąĖąĘą║ąŠą│ąŠ ą║ čüą░ą╝ąŠą╝čā ą▓čŗčüąŠą║ąŠą╝čā.
ąöąĄąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ą░ąĮą░ą╗ą░ RMT. ąĢčüą╗ąĖ ąĖąĮčüčéą░ą╗ą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą║ą░ąĮą░ą╗ RMT ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝ čĆąĄčüčāčĆčüčŗ ą▓čŗąĘąŠą▓ąŠą╝ rmt_del_channel(), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čŹčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čĆąĄčüčāčĆčüčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣.
[ą£ąŠą┤čāą╗čÅčåąĖčÅ ąĖ ą┤ąĄą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĮąĄčüčāčēąĄą╣]
ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ RMT ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ ąĮąĄčüčāčēąĄą╣ ąĖ ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ąĄą│ąŠ ą▓ čüąĖą│ąĮą░ą╗ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąĖą│ąĮą░ą╗ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ čćą░čüč鹊čéą░ čüąĖą│ąĮą░ą╗ą░ ąĮąĄčüčāčēąĄą╣ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▓čŗčłąĄ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ ąĮąĄčüčāčēąĄą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī č鹊ą╗čīą║ąŠ čćą░čüč鹊čéčā ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī. ą¤čĆąĖąĄą╝ąĮąĖą║ RMT ą╝ąŠąČąĄčé ą┤ąĄą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ ąĮąĄčüčāčēąĄą╣ ąĖąĘ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĖ ą┤ąĄą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĮąĄčüčāčēąĄą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĮąĄ ą▓čüąĄą╝ąĖ čćąĖą┐ą░ą╝ąĖ ESP ą┐ąŠčŹč鹊ą╝čā ą┐čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆčāą╣č鹥čüčī čü č鹥čģąĮąĖč湥čüą║ąĖą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝, ąĖą╗ąĖ ą▓čŗ ą╝ąŠąČąĄč鹥 čüč鹊ą╗ą║ąĮčāčéčīčüčÅ čü ąŠčłąĖą▒ą║ąŠą╣ ESP_ERR_NOT_SUPPORTED.
ąĪą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĄčüčāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ rmt_carrier_config_t:
rmt_carrier_config_t::frequency_hz čāčüčéą░ąĮąŠą▓ąĖčé čćą░čüč鹊čéčā ąĮąĄčüčāčēąĄą╣ ą▓ ąōčå.
rmt_carrier_config_t::duty_cycle čāčüčéą░ąĮąŠą▓ąĖčé čüą║ą▓ą░ąČąĮąŠčüčéčī ąĮąĄčüčāčēąĄą╣.
rmt_carrier_config_t::polarity_active_low čāčüčéą░ąĮąŠą▓ąĖčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčī ąĮąĄčüčāčēąĄą╣, čé. ąĄ. čāčĆąŠą▓ąĄąĮčī, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąĮąĄčüčāčēą░čÅ.
rmt_carrier_config_t::always_on čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ąĮčāąČąĮąŠ ą╗ąĖ ą▓čŗą▓ąŠą┤ąĖčéčī ąĮąĄčüčāčēčāčÄ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéą░ ąŠą┐čåąĖčÅ ą┤ąĄą╣čüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ TX.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RX ą╝čŗ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī čćą░čüč鹊čéčā ąĮąĄčüčāčēąĄą╣ č鹊čćąĮąŠ ąĮą░ č鹥ąŠčĆąĄčéąĖč湥čüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąŠčüčéą░ą▓ąĖčéčī ą┤ąŠą┐čāčüą║ ąĮą░ čćą░čüč鹊čéčā ąĮąĄčüčāčēąĄą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ąŠ čäčĆą░ą│ą╝ąĄąĮč鹥 ą║ąŠą┤ą░ ąĮąĖąČąĄ ą╝čŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ čćą░čüč鹊čéčā 25 ą║ąōčå ą▓ą╝ąĄčüč鹊 38 ą║ąōčå, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĮą░ čüč鹊čĆąŠąĮąĄ TX. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ąŠčéčĆą░ąČąĄąĮąĖąĄ ąĖ ą┐čĆąĄą╗ąŠą╝ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤čÅčé, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé ą┐ąŠ ą▓ąŠąĘą┤čāčģčā, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĖčüą║ą░ąČąĄąĮąĖčÄ ąĮą░ čüč鹊čĆąŠąĮąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
rmt_carrier_config_t tx_carrier_cfg = {
.duty_cycle = 0.33, // čüą║ą▓ą░ąČąĮąŠčüčéčī 33%
.frequency_hz = 38000, // 38 ą║ąōčå
.flags.polarity_active_low = false, // ąĮąĄčüčāčēą░čÅ ą┤ąŠą╗ąČąĮą░ ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčīčüčÅ
// ą▓čŗčüąŠą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝
};
// ą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĮąĄčüčāčēąĄą╣ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ TX
ESP_ERROR_CHECK(rmt_apply_carrier(tx_chan, &tx_carrier_cfg));
rmt_carrier_config_t rx_carrier_cfg = {
.duty_cycle = 0.33, // čüą║ą▓ą░ąČąĮąŠčüčéčī 33%
.frequency_hz = 25000, // ąĮąĄčüčāčēą░čÅ 25 ą║ąōčå, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮąĖąČąĄ,
// č湥ą╝ čćą░čüč鹊čéą░ ąĮąĄčüčāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░
.flags.polarity_active_low = false, // ąĮąĄčüčāčēą░čÅ ą╝ąŠą┤čāą╗ąĖčĆčāąĄčéčüčÅ ą▓čŗčüąŠą║ąĖą╝
// čāčĆąŠą▓ąĮąĄą╝
};
// ą┤ąĄą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĮąĄčüčāčēąĄą╣ ąĖąĘ ą║ą░ąĮą░ą╗ą░ RX
ESP_ERROR_CHECK(rmt_apply_carrier(rx_chan, &rx_carrier_cfg));
[ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ Event Callbacks]
ąÜąŠą│ą┤ą░ ąĮą░ ą║ą░ąĮą░ą╗ąĄ RMT ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖą╗ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮ ą┐čĆąĖąĄą╝), CPU ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ ąŠą▒ čŹč鹊ą╝ čüąŠą▒čŗčéąĖąĖ. ąĢčüą╗ąĖ čā ą▓ą░čü ąĄčüčéčī ą║ą░ą║ą░čÅ-č鹊 čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī callback ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ RMT (Interrupt Service Routine, ISR) ą▓čŗąĘąŠą▓ąŠą╝ rmt_tx_register_event_callbacks() ąĖ rmt_rx_register_event_callbacks() ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ TX ąĖ RX čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą¤ąŠčüą║ąŠą╗čīą║čā ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ callback-čäčāąĮą║čåąĖąĖ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čŗčüčéčĆąĄąĄ, čćč鹊ą▒čŗ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤čĆčāą│ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ąŠčüčéą░ą╗čīąĮąŠą│ąŠ ą║ąŠą┤ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓ callback-čäčāąĮą║čåąĖąĖ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ č鹥 API-čäčāąĮą║čåąĖąĖ FreeRTOS, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé čüčāčäčäąĖą║čü FromISR. ąŻ callback-čäčāąĮą║čåąĖąĖ ą┤ą▓ąŠąĖčćąĮąŠąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ č鹊ą│ąŠ, ą▒čŗą╗ą░ ą╗ąĖ ąĘą░ą┤ą░čćą░ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ callback.
ąĪąŠą▒čŗčéąĖčÅ ą║ą░ąĮą░ą╗ą░ TX ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ rmt_tx_event_callbacks_t:
rmt_tx_event_callbacks_t::on_trans_done čāčüčéą░ąĮąŠą▓ąĖčé callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ("trans-done"). ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮ ą▓ rmt_tx_done_callback_t.
ąĪąŠą▒čŗčéąĖčÅ ą║ą░ąĮą░ą╗ą░ RX ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ rmt_rx_event_callbacks_t:
rmt_rx_event_callbacks_t::on_recv_done čāčüčéą░ąĮąŠą▓ąĖčé callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ("receive-done"). ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮ ą▓ rmt_rx_done_callback_t.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ "receive-done" "receive-finished". ąŁč鹊čé callback ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą▓čŗąĘą▓ą░ąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ čćą░čüčéąĖčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ("partial-receive-done"), ą╝ąĮąŠąČąĄčüčéą▓ąŠ čĆą░ąĘ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐čĆąĖąĄą╝ą░.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé čéą░ą║ąČąĄ čüąŠčģčĆą░ąĮąĖčéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą║ąŠąĮč鹥ą║čüčé ą▓ rmt_tx_register_event_callbacks() ąĖ rmt_rx_register_event_callbacks(), č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ user_data. User data ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą║ą░ąČą┤čāčÄ callback-čäčāąĮą║čåąĖčÄ.
ąÆ č鹥ą╗ąĄ callback-čäčāąĮą║čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĖąĘą▓ą╗ąĄą║ą░čéčī čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čüąŠą▒čŗčéąĖąĄą╝ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą▓ edata. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čāą║ą░ąĘą░č鹥ą╗čī edata ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ callback, ąĮąĄ ą┐čŗčéą░ą╣č鹥čüčī čüąŠčģčĆą░ąĮąĖčéčī čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄą│ąŠ ą▓ąĮąĄ callback-čäčāąĮą║čåąĖąĖ.
ąöą░ąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ TX-done ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ rmt_tx_done_event_data_t:
rmt_tx_done_event_data_t::num_symbols ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT. ąŁč鹊 čéą░ą║ąČąĄ ąŠčéčĆą░ąČą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║ąČąĄ čāčćąĖčéčŗą▓ą░ąĄčé čüąĖą╝ą▓ąŠą╗ EOF, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, čćč鹊ą▒čŗ ą┐ąŠą╝ąĄčéąĖčéčī ą║ąŠąĮąĄčå ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąöą░ąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ RX-complete ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ rmt_rx_done_event_data_t:
rmt_rx_done_event_data_t::received_symbols čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą┐čĆąĖąĮčÅčéčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ RMT. ąŁčéąĖ čüąĖą╝ą▓ąŠą╗čŗ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ buffer čäčāąĮą║čåąĖąĖ rmt_receive(). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čéčī čŹč鹊čé ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą┐ąĄčĆąĄą┤ ą▓ąŠąĘą▓čĆą░č鹊ą╝ ąĖąĘ callback. ąĢčüą╗ąĖ ą▓čŗ čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłąĖą╗ąĖ čäąĖčćčā čćą░čüčéąĖčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ (partial receive), č鹊 ą▒čāč乥čĆ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ "ą▒čāč乥čĆ ą▓č鹊čĆąŠą│ąŠ čāčĆąŠą▓ąĮčÅ", ą│ą┤ąĄ ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╝ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čŗ ą┤ąŠą╗ąČąĮčŗ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┤čĆčāą│ąŠąĄ ą╝ąĄčüč鹊, ąĄčüą╗ąĖ čģąŠčéąĖč鹥 čüąŠčģčĆą░ąĮąĖčéčī ąĖčģ ąĖą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐ąŠąĘąČąĄ.
rmt_rx_done_event_data_t::num_symbols ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ buffer_size čäčāąĮą║čåąĖąĖ rmt_receive(). ąĢčüą╗ąĖ buffer_size ąĮąĄą┤ąŠčüčéą░č鹊č湥ąĮ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą▓čüąĄčģ ą┐čĆąĖąĮčÅčéčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ čüąŠčģčĆą░ąĮąĖčé č鹊ą╗čīą║ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓, ą║ąŠč鹊čĆąŠąĄ čüą╝ąŠąČąĄčé čüąŠčģčĆą░ąĮąĖčéčī buffer, ąĖ ą╗ąĖčłąĮąĖąĄ čüąĖą╝ą▓ąŠą╗čŗ ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąĖą╗ąĖ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
rmt_rx_done_event_data_t::is_last ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ č鹥ą║čāčēąĖą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒čāč乥čĆ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą▓ ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, ą║ąŠą│ą┤ą░ ą▓čŗ čĆą░ąĘčĆąĄčłąĖą╗ąĖ čäąĖčćčā partial reception č湥čĆąĄąĘ rmt_receive_config_t::extra_rmt_receive_flags::en_partial_rx.
[ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖ ąĘą░ą┐čĆąĄčé ą║ą░ąĮą░ą╗ą░]
ążčāąĮą║čåąĖčÅ rmt_enable() ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąŠą╝ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT. ąöą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ TX čĆąĄąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ čĆą░ąĘčĆąĄčłą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┤ą╗čÅ ą┤ąĖčüą┐ąĄčéč湥čĆąĖąĘą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖą╣. ąöą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ RX čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé, ą┐ąŠčüą║ąŠą╗čīą║čā čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĄčēąĄ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ. ą¤čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ rmt_receive().
ążčāąĮą║čåąĖčÅ rmt_disable() ą┤ąĄą╗ą░ąĄčé ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ąŠčćąĖčüčéą║ąŠą╣ ą▓čüąĄčģ ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ čéą░ą║ąČąĄ ąŠčéą║ą╗čÄčćą░čÄčéčüčÅ.
ESP_ERROR_CHECK(rmt_enable(tx_chan));
ESP_ERROR_CHECK(rmt_enable(rx_chan));
[ąśąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ TX]
RMT čŹč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ąĮąĄ ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠč鹊ą║ąĖ čüčŗčĆčŗčģ ą▒ą░ą╣čé ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ SPI ąĖ I2C. RMT ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čüą▓ąŠąĄą╝ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╝ č乊čĆą╝ą░č鹥 rmt_symbol_word_t. ą×ą┤ąĮą░ą║ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąĮąĄ ą┐ąŠą╝ąŠą│ą░ąĄčé ą▓ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ čüąĖą╝ą▓ąŠą╗čŗ RMT, čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮąŠ č鹊ą╗čīą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╝ 菹Įą║ąŠą┤ąĄčĆąŠą╝ (RMT Encoder). ąŁč鹊čé 菹Įą║ąŠą┤ąĄčĆ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ čüąĖą╝ą▓ąŠą╗čŗ RMT, ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüčī ą▓ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ RMT ąĖą╗ąĖ ą▒čāč乥čĆ DMA. ąÜą░ą║ čüąŠąĘą┤ą░ą▓ą░čéčī RMT encoder, čüą╝. ąĄą│ąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┤ą░ą╗ąĄąĄ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗ čüąŠąĘą┤ą░ą╗ąĖ encoder, ą╝ąŠąČąĮąŠ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ TX ą▓čŗąĘąŠą▓ąŠą╝ rmt_transmit(). ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ąŠąĘąĖčåąĖąŠąĮąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą║ą░ąĮą░ą╗ą░, ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ encoder ąĖ ą▒čāč乥čĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ. ą¤ąŠą╝ąĖą╝ąŠ čŹč鹊ą│ąŠ ą▓ą░ą╝ čéą░ą║ąČąĄ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠčéąĮąŠčüčÅčēčāčÄčüčÅ ą║ ą┐ąĄčĆąĄą┤ą░č湥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą▓ čüčéčĆčāą║čéčāčĆąĄ rmt_transmit_config_t:
rmt_transmit_config_t::loop_count čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąĘą░ą▓ąĄčĆčłąĖčé ąŠą┤ąĖąĮ čåąĖą║ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąŠąĮ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčé čéčā ąČąĄ čüą░ą╝čāčÄ ą┐ąĄčĆąĄą┤ą░čćčā čüąĮąŠą▓ą░, ąĄčüą╗ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0. ą¤ąŠčüą║ąŠą╗čīą║čā čåąĖą║ą╗čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą║ą░ąĮą░ą╗ RMT ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą╝ąĮąŠąČąĄčüčéą▓ą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüč鹥ą╣ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ąŠą╝ CPU.
- ąŻčüčéą░ąĮąŠą▓ą║ą░ rmt_transmit_config_t::loop_count ą▓ -1 ąŠąĘąĮą░čćą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗąĄ čåąĖą║ą╗čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą║ą░ąĮą░ą╗ ąĮąĄ ąŠčüčéą░ąĮąŠą▓ąĖčé ą┐ąĄčĆąĄą┤ą░čćčā, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗąĘąŠą▓ rmt_disable(). ąĪąŠą▒čŗčéąĖąĄ "trans-done" ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ.
- ąŻčüčéą░ąĮąŠą▓ą║ą░ rmt_transmit_config_t::loop_count ą▓ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ ąŠąĘąĮą░čćą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖč鹥čĆą░čåąĖą╣. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąŠą▒čŗčéąĖąĄ "trans-done" ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖč鹥čĆą░čåąĖą╣.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: čäąĖčćą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čåąĖą║ą╗ą░ą╝ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĮąĄ ą▓čüąĄą╝ąĖ čćąĖą┐ą░ą╝ąĖ ESP čéą░ą║ čćč鹊 ąŠą▒čĆą░čéąĖč鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ą┐ąŠ ą▓ą░čłąĄą╝čā čćąĖą┐čā ą┐ąĄčĆąĄą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čŹč鹊ą╣ ąŠą┐čåąĖąĖ, ąĖąĮą░č湥 ą▓čŗ ą╝ąŠąČąĄč鹥 čüč鹊ą╗ą║ąĮčāčéčīčü čü ąŠčłąĖą▒ą║ąŠą╣ ESP_ERR_NOT_SUPPORTED.
rmt_transmit_config_t::eot_level čāčüčéą░ąĮąŠą▓ąĖčé ą▓čŗčģąŠą┤ąĮąŠą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąĘą░ą▓ąĄčĆčłąĖčé čĆą░ą▒ąŠčéčā ąĖą╗ąĖ ąŠčüčéą░ąĮąŠčĆąĖčé čĆą░ą▒ąŠčéčā ąĖąĘ-ąĘą░ ą▓čŗąĘąŠą▓ą░ rmt_disable().
rmt_transmit_config_t::queue_nonblocking ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ąČą┤ą░čéčī ą╗ąĖ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ čüą╗ąŠčé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ ąŠąĮą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮą░. ąĢčüą╗ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ true, č鹊 čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ESP_ERR_INVALID_STATE, ą║ąŠą│ą┤ą░ ąŠč湥čĆąĄą┤čī ąĘą░ą┐ąŠą╗ąĮąĄąĮą░. ąśąĮą░č湥 čäčāąĮą║čåąĖčÅ ąĘą░ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ, ą┐ąŠą║ą░ ąĮąĄ čüčéą░ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮčŗą╝ čüą╗ąŠčé ą▓ ąŠč湥čĆąĄą┤ąĖ.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąĘą┤ąĄčüčī ąĄčüčéčī ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąĮą░ čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ rmt_transmit_config_t::loop_count čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čäąĖčćčā čåąĖą║ą╗ąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŚą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ RMT ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą▓čŗčłą░čéčī čĆą░ąĘą╝ąĄčĆ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ RMT, ąĖąĮą░č湥 ą▓čŗ ą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, čéą░ą║ ą║ą░ą║ ą░čĆč鹥čäą░ą║čéčŗ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄ ą╝ąŠą│čāčé ą┐čĆąĄą▓čŗčłą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čåąĖą║ą╗ąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ ą▓ą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą▓ čåąĖą║ą╗ąĄ ą▒ąŠą╗čīčłčāčÄ čéčĆą░ąĮąĘą░ą║čåąĖčÄ, č鹊 ą╝ąŠąČąĄč鹥 ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąŠą┤ąĖąĮ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą╝ąĄč鹊ą┤ąŠą▓.
ŌĆó ąŻą▓ąĄą╗ąĖčćčīč鹥 rmt_tx_channel_config_t::mem_block_symbols. ąŁč鹊čé čüą┐ąŠčüąŠą▒ ąĮąĄ čüčĆą░ą▒ąŠčéą░ąĄčé, ąĄčüą╗ąĖ čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłąĄąĮ DMA backend.
ŌĆó ąØą░čüčéčĆąŠą╣č鹥 encoder ąĖ čüą║ąŠąĮčüčéčĆčāąĖčĆčāą╣č鹥 ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą▓ čäčāąĮą║čåąĖąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąĪą╝. čéą░ą║ąČąĄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ RMT Encoder.
ąÆąĮčāčéčĆąĄąĮąĮąĄ rmt_transmit() čüąŠąĘą┤ą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖ ą┐ąŠčüčŗą╗ą░ąĄčé ąĄą│ąŠ ą▓ ąŠč湥čĆąĄą┤čī ąĘą░ą┤ą░ąĮąĖą╣, ą║ąŠč鹊čĆą░čÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ISR. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĄčēąĄ ąĮąĄ ąĘą░ą┐čāčēąĄąĮą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓ąŠąĘą▓čĆą░čé ąĖąĘ rmt_transmit(). ąØąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠą▓č鹊čĆąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą╗ąĖ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą▒čāč乥čĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą┐ąŠą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗čāčćąĖčéčī čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐čāč鹥ą╝ čĆąĄą│ąĖčüčéčĆą░ąĖąĖ callback-čäčāąĮą║čåąĖąĖ ą▓čŗąĘąŠą▓ąŠą╝ rmt_tx_register_event_callbacks(). ą¦č鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▓čüąĄ ąŠąČąĖą┤ą░čÄčēąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą▓ąĄčĆčłąĄąĮčŗ, ą▓čŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī rmt_tx_wait_all_done().
[ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ]
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖčÅ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┤ą▓čāčģ čĆčāą║ čĆąŠą▒ąŠčéą░), ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮąĄ čģąŠč鹥čéčī ą┐ąŠą╗čāčćąĖčéčī ą╗čÄą▒ąŠą╣ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┤čĆąĄą╣čä ą╝ąĄąČą┤čā čĆą░ąĘąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ. ąöčĆą░ą╣ą▓ąĄčĆ RMT ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī ą▓ čŹč鹊ą╝ ą┐čāč鹥ą╝ čüąŠąĘą╗ą░ąĮąĖčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą│ąŠ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (Sync Manager). ąÆ ą┤čĆą░ą╣ą▓ąĄčĆąĄ ą╝ąĄąĮąĄą┤ąČąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ čéąĖą┐ąŠą╝ rmt_sync_manager_handle_t. ą¤čĆąŠčåąĄą┤čāčĆą░ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ RMT ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ:
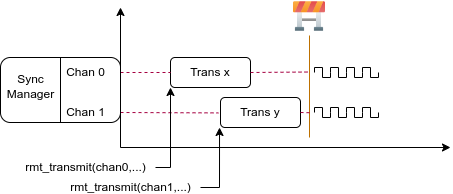
ąĀąĖčü. 4. RMT TX Sync.
ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ RMT Sync Manager. ą¦č鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą╝ąĄąĮąĄą┤ąČąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ čāą║ą░ąĘą░čéčī, ą║ą░ą║ąĖąĄ ą║ą░ąĮą░ą╗čŗ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ, ą▓ rmt_sync_manager_config_t:
rmt_sync_manager_config_t::tx_channel_array čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą╝ą░čüčüąĖą▓ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓ TX.
rmt_sync_manager_config_t::array_size čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓.
ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ rmt_new_sync_manager() ą╝ąŠąČąĄčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą╝ąĄąĮąĄą┤ąČąĄčĆą░. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĘą░ą▓ąĄčĆčłąĖčéčīčüčÅ ąĮąĄčāą┤ą░č湥ą╣ ąĖąĘ-ąĘą░ čĆą░ąĘąĮčŗčģ ąŠčłąĖą▒ąŠą║, čéą░ą║ąĖčģ ą║ą░ą║ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ą░čĆą│čāą╝ąĄąĮčéčŗ, ąĖ čé. ą┤. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą║ąŠą│ą┤ą░ sync manager ą▒čŗą╗ ąĖąĮčüčéą░ą╗ą╗ąĖčĆąŠą▓ą░ąĮ čĆą░ąĮąĄąĄ, ąĖ čüąĄą╣čćą░čü ąĮąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤čĆčāą│ąŠą│ąŠ ą╝ąĄąĮąĄą┤ąČąĄčĆą░, čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąŠčłąĖą▒ą║čā ESP_ERR_NOT_FOUND. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ, ąĄčüą╗ąĖ sync manager ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣, ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ąŠčłąĖą▒ą║ą░ ESP_ERR_NOT_SUPPORTED. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ąĮą░ ą▓ą░čł ESP ą┐ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäąĖčćąĖ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąŚą░ą┐čāčüą║ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöą╗čÅ ą╗čÄą▒ąŠą│ąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠąĮ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčé ą╝ą░čłąĖąĮčā ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ rmt_transmit () ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮ ą┤ą╗čÅ ą▓čüąĄčģ ą║ą░ąĮą░ą╗ąŠą▓ ą▓ rmt_sync_manager_config_t::tx_channel_array. ą¤ąĄčĆąĄą┤ čŹčéąĖą╝ ą║ą░ąĮą░ą╗ ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. ąÜą░ąĮą░ą╗čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą▒čŗčćąĮąŠ ąĘą░ą▓ąĄčĆčłą░čÄčé čüą▓ąŠąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą▓ čĆą░ąĘąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖąĘ-ąĘą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąŠč鹥čĆąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą¤ąŠčŹč鹊ą╝čā ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ąŠą╝ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗąĘą▓ą░čéčī rmt_sync_reset (), čćč鹊ą▒čŗ čüąĮąŠą▓ą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą║ą░ąĮą░ą╗čŗ.
ąÆčŗąĘąŠą▓ rmt_del_sync_manager() ą╝ąŠąČąĄčé ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī sync manager ąĖ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą║ą░ąĮą░ą╗ą░ą╝ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ čéčĆą░ąĮąĘą░čåąĖąĖ.
rmt_channel_handle_t tx_channels[2] = {NULL}; // ą┤ąĄą║ą╗ą░čĆą░čåąĖčÅ 2 ą║ą░ąĮą░ą╗ąŠą▓
int tx_gpio_number[2] = {0, 2};
// ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ą░ąĮą░ą╗ąŠą▓ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝:
for (int i = 0; i < 2; i++) {
rmt_tx_channel_config_t tx_chan_config = {
.clk_src = RMT_CLK_SRC_DEFAULT, // ą▓čŗą▒ąŠčĆ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
.gpio_num = tx_gpio_number[i], // ąĮąŠą╝ąĄčĆ GPIO
.mem_block_symbols = 64, // čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ, 64 * 4 = 256 ą▒ą░ą╣čé
.resolution_hz = 1 * 1000 * 1000, // čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 1 ą£ąōčå
.trans_queue_depth = 1, // čāčüčéą░ąĮąŠą▓ąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéčĆą░ąĮąĘą░ą║čåąĖą╣,
// ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąŠąČąĖą┤ą░čéčī ą▓ č乊ąĮąĄ
};
ESP_ERROR_CHECK(rmt_new_tx_channel(&tx_chan_config, &tx_channels[i]));
}
// čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ąŠą▓
for (int i = 0; i < 2; i++) {
ESP_ERROR_CHECK(rmt_enable(tx_channels[i]));
}
// ąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÅ sync manager
rmt_sync_manager_handle_t synchro = NULL;
rmt_sync_manager_config_t synchro_config = {
.tx_channel_array = tx_channels,
.array_size = sizeof(tx_channels) / sizeof(tx_channels[0]),
};
ESP_ERROR_CHECK(rmt_new_sync_manager(&synchro_config, &synchro));
ESP_ERROR_CHECK(rmt_transmit(tx_channels[0], led_strip_encoders[0],
led_data, led_num * 3, &transmit_config));
// tx_channels[0] ąĮąĄ ąĮą░čćąĮąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī, ą┐ąŠą║ą░ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé
// ą▓ąŠąĘą▓čĆą░čé ą▓čŗąĘąŠą▓ą░ `rmt_transmit()` ą┤ą╗čÅ tx_channels[1]
ESP_ERROR_CHECK(rmt_transmit(tx_channels[1], led_strip_encoders[1],
led_data, led_num * 3, &transmit_config));
[ąśąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ RX]
ąÜą░ą║ čéą░ą║ąČąĄ ąŠą▒čüčāąČą┤ą░ą╗ąŠčüčī ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖ ąĘą░ą┐čĆąĄčé ą║ą░ąĮą░ą╗ą░", ą▓čŗąĘąŠą▓ rmt_enable() ąĮąĄ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé RX ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ čāą║ą░ąĘą░čéčī ą▒ą░ąĘąŠą▓čŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ rmt_receive_config_t:
rmt_receive_config_t::signal_range_min_ns čāą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ ą┤ąŠą┐čāčüčéąĖą╝čāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąĖą▒ąŠ ą╗ąŠą│. 1, ą╗ąĖą▒ąŠ ą╗ąŠą│. 0. ą©ąĖčĆąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ą╝ąĄąĮčīčłąĄ čŹč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüčćąĖčéą░ąĄčéčüčÅ ąĖą╝ą┐čāą╗čīčüąŠą╝ ą┐ąŠą╝ąĄčģąĖ ąĖ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ.
rmt_receive_config_t::signal_range_max_ns čāą║ą░ąĘčŗą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéą╝čāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą╗ąŠą│. 1, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą╗ąŠą│. 0. ą©ąĖčĆąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░, ą║ąŠč鹊čĆčÅ ą▒ąŠą╗čīčłąĄ čŹč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ čüąĖą│ąĮą░ą╗ Stop, ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (receive-complete event).
ąĢčüą╗ąĖ ą┐čĆąĖčģąŠą┤čÅčēąĖą╣ ą┐ą░ą║ąĄčé ą┤ą╗ąĖąĮąĮčŗą╣, čéą░ą║ čćč鹊 ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮ ą▓ ą▒čāč乥čĆąĄ, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 čĆą░ąĘčĆąĄčłąĖčéčī čäąĖčćčā čćą░čüčéąĖčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓ true čäą╗ą░ą│ą░ rmt_receive_config_t::extra_rmt_receive_flags::en_partial_rx. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą┐čāčüčéąĖčé callback-čäčāąĮą║čåąĖčÄ rmt_rx_event_callbacks_t::on_recv_done ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ąĘą░ ąŠą┤ąĮčā čéčĆą░ąĮąĘą░ą║čåąĖčÄ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠčćčéąĖ ą┐ąŠą╗ąŠąĮ. ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐čĆąŠą▓ąĄčĆąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ :cpp:member::rmt_rx_done_event_data_t::is_last, čćč鹊ą▒čŗ čāąĘąĮą░čéčī, ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ą╗ąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹčéąĖ čäąĖčćąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮąĄ ą▓čüąĄą╝ąĖ ą┐čĆąĄą┤čüčéą░ą▓ąĖč鹥ą╗čÅą╝ąĖ čüąĄčĆąĖąĖ čćąĖą┐ąŠą▓ ESP, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ "ping-pong receive" ąĖą╗ąĖ "DMA receive".
ą¤čĆąĖąĄą╝ąĮąĖą║ RMT ąĘą░ą┐čāčüčéąĖčé RX-ą╝ą░čłąĖąĮčā ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▓čŗąĘąŠą▓ąĄčé rmt_receive() čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣, ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą▓čŗčłąĄ. ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čŹčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ąĖ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ čĆą░čāąĮą┤ą░ ą┐čĆąĖąĄą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ čüąĮąŠą▓ą░ čāčüčéą░ąĮąŠą▓ąĖčéčī rmt_receive_config_t. ą¤čĆąĖąĄą╝ąĮąĖą║ čüąŠčģčĆą░ąĮąĖčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ čüą▓ąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ ąĖą╗ąĖ ą▒čāč乥čĆ DMA, ą▓ č乊čĆą╝ą░č鹥 rmt_symbol_word_t.
ąśąĘ-ąĘą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ RMT ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĮą░ą║ąŠą┐ą╗ąĄąĮąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ čüą┐ąŠčüąŠą▒ąŠą╝ ą┐ąĖąĮą│-ą┐ąŠąĮą│ą░.
ą£ąĄčüč鹊 ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠą┐ąĖąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ buffer čäčāąĮą║čåąĖąĖ rmt_receive(). ąĢčüą╗ąĖ čŹč鹊čé ą▒čāč乥čĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ąĖąĘ-ąĘą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čĆą░ą▒ąŠčéčā, ąĮąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąĖ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ: "user buffer too small, received symbols truncated". ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čåąĖą║ą╗ ąČąĖąĘąĮąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ buffer, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąĄą│ąŠ ąĮą░ą╗ąĖčćąĖąĄ, čé. ąĄ. ąŠąĮ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čéčīčüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā ąĖą╗ąĖ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą║ąŠą│ą┤ą░ ąŠąĮ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖąĮčÅčé čüąĖą│ąĮą░ą╗ čü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą▒ąŠą╗čīčłąĄ rmt_receive_config_t::signal_range_max_ns. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ ą▓čŗąĘą▓ą░čéčī rmt_receive() čüąĮąŠą▓ą░, čćč鹊ą▒čŗ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ callback-čäčāąĮą║čåąĖąĖ rmt_rx_event_callbacks_t::on_recv_done. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čéą░ą║ąČąĄ "ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ Event Callbacks".
static bool example_rmt_rx_done_callback(rmt_channel_handle_t channel,
const rmt_rx_done_event_data_t *edata,
void *user_data)
{
BaseType_t high_task_wakeup = pdFALSE;
QueueHandle_t receive_queue = (QueueHandle_t)user_data;
// ąŠčéą┐čĆą░ą▓ą║ą░ ą┐čĆąĖąĮčÅčéčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT ą▓ ąĘą░ą┤ą░čćčā ą┐ą░čĆčüąĄčĆą░
xQueueSendFromISR(receive_queue, edata, &high_task_wakeup);
// ą▓ąŠąĘą▓čĆą░čéąĖčé, ą┐čĆąŠą▒čāąČą┤ąĄąĮą░ ą╗ąĖ ą║ą░ą║ą░čÅ-ą╗ąĖą▒ąŠ ąĘą░ą┤ą░čćą░
return high_task_wakeup == pdTRUE;
}
QueueHandle_t receive_queue = xQueueCreate(1, sizeof(rmt_rx_done_event_data_t));
rmt_rx_event_callbacks_t cbs = {
.on_recv_done = example_rmt_rx_done_callback,
};
ESP_ERROR_CHECK(rmt_rx_register_event_callbacks(rx_channel, &cbs, receive_queue));
// ąĪą╗ąĄą┤čāčÄčēąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ NEC:
rmt_receive_config_t receive_config = {
.signal_range_min_ns = 1250, // čüą░ą╝ą░čÅ ą║ąŠčĆąŠčéą║ą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ NEC
// 560 ┬Ąs, 1250 ns < 560 ┬Ąs, ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣
// čüąĖą│ąĮą░ą╗ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ čłčāą╝
.signal_range_max_ns = 12000000, // čüą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ NEC
// 9000 ┬Ąs, 12000000 ns > 9000 ┬Ąs,
// ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ čĆą░ąĮčīčłąĄ
};
rmt_symbol_word_t raw_symbols[64]; // 64 čüąĖą╝ą▓ąŠą╗ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ
// čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą║ą░ą┤čĆą░ NEC
// ą▓čüąĄ ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░
ESP_ERROR_CHECK(rmt_receive(rx_channel, raw_symbols, sizeof(raw_symbols),
&receive_config));
// ąŠąČąĖą┤ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (RX-done)
rmt_rx_done_event_data_t rx_data;
xQueueReceive(receive_queue, &rx_data, portMAX_DELAY);
// ą┐ą░čĆčüąĖąĮą│ ą┐čĆąĖąĮčÅčéčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓
example_parse_nec_frame(rx_data.received_symbols, rx_data.num_symbols);
[RMT Encoder]
RMT encoder čŹč鹊 čćą░čüčéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ RMT TX, ą║ąŠč鹊čĆą░čÅ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ąĖ ąĘą░ą┐ąĖčüčī ą║ąŠčĆčĆąĄą║čéąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT ą▓ ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ ą┐ą░ą╝čÅčéčī ąĖą╗ąĖ ą▒čāč乥čĆ DMA ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąĢčüčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ:
ŌĆó ąÆąŠ ą▓čĆąĄą╝čÅ ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čäčāąĮą║čåąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ. ąŁč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 čåąĄą╗ąĄą▓ąŠą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ RMT ąĮąĄ ą╝ąŠąČąĄčé čģčĆą░ąĮąĖčéčī čüčĆą░ąĘčā ą▓čüąĄ ą░čĆč鹥čäą░ą║čéčŗ. ą¦č鹊ą▒čŗ ą┐čĆąĄąŠą┤ąŠą╗ąĄčéčī čŹč鹊 ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ, ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄč鹊ą┤ ą┐ąĖąĮą│-ą┐ąŠąĮą│ą░, ą│ą┤ąĄ čüąĄčüčüąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čćą░čüč鹥ą╣. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠą┤ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, čćč鹊ą▒čŗ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī čü č鹊ą│ąŠ ą╝ąĄčüčéą░, ą│ą┤ąĄ ąŠąĮ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čćą░čüčéąĖ.
ŌĆó ążčāąĮą║čåąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ISR-ą║ąŠąĮč鹥ą║čüč鹥. ąöą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ čüąĄčüčüąĖąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąŠą╝ąĄčüčéąĖčéčī ąĄčæ ą║ąŠą┤ ą▓ IRAM. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ąĖąĘą▒ąĄąČą░čéčī čüą╗čāčćą░ą╣ąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║ ą┐čĆąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖąĘ-ąĘą░ ą┐čĆąŠą╝ą░čģąŠą▓ ą║čŹčłą░.
ą¦č鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī ą▒čŗčüčéčĆąĄąĄ ą┐čĆąĖą╝ąĄąĮąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ RMT, ąĖąĘ ą║ąŠčĆąŠą▒ą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠą┤ąĄčĆčŗ. ą×ąĮąĖ ą╝ąŠą│čāčé ą╗ąĖą▒ąŠ čĆą░ą▒ąŠčéą░čéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ, ą╗ąĖą▒ąŠ ą╝ąŠą│čāčé čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ ą▓ čåąĄą┐ąŠčćą║čā ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓ ąĮąŠą▓čŗą╣ ą║ąŠą┤ąĄčĆ. ąĪą╝. čéą░ą║ąČąĄ Composite Pattern [2] ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą╗ąĄąČą░čēąĄą│ąŠ ą┐ąŠą┤ čŹčéąĖą╝ ą┐čĆąĖąĮčåąĖą┐ą░. ąöčĆą░ą╣ą▓ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠą┤ąĖčĆąŠą▓čēąĖą║ą░ ą▓ rmt_encoder_t, ąŠąĮ čüąŠą┤ąĄčƹȹĖčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
rmt_encoder_t::encode čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą║ąŠą┤ąĄčĆą░. ąŚą┤ąĄčüčī ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąĄą░ąĮčü ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ.
- ążčāąĮą║čåąĖčÅ encode ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▓ ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą×ąĮą░ ą┤ąŠą╗ąČąĮą░ ą▓ąŠąĘą▓čĆą░čéąĖčéčī čüąŠčüč鹊čÅąĮąĖčÅ č鹥ą║čāčēąĄą╣ čüąĄčüčüąĖąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ.
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ rmt_encode_state_t. ąĢčüą╗ąĖ čĆąĄąĘčāą╗čīčéą░čé čüąŠą┤ąĄčƹȹĖčé RMT_ENCODING_COMPLETE, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 č鹥ą║čāčēąĖą╣ ą║ąŠą┤ąĄčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā.
- ąĢčüą╗ąĖ čĆąĄąĘčāą╗čīčéą░čé čüąŠą┤ąĄčƹȹĖčé RMT_ENCODING_MEM_FULL, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ą▓čŗą╣čéąĖ ąĖąĘ č鹥ą║čāčēąĄą╣ čüąĄčüčüąĖąĖ, čéą░ą║ ą║ą░ą║ ąĮąĄčé ą╝ąĄčüčéą░ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ.
rmt_encoder_t::reset ą┤ąŠą╗ąČąĮą░ čüą▒čĆąŠčüąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠ ą║ ąĮą░čćą░ą╗čīąĮąŠą╝čā čüąŠčüč鹊čÅąĮąĖčÄ (ą║ąŠą┤ąĄčĆ RMT ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ).
- ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ RMT ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čĆčāčćąĮčāčÄ ą▒ąĄąĘ čüą▒čĆąŠčüą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ąŠą┤ąĄčĆą░, ą┐ąŠčüą╗ąĄą┤čāčÄčēą░čÅ čüąĄčüčüąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčłąĖą▒ąŠčćąĮąŠą╣.
- ąŁčéą░ čäčāąĮą║čåąĖčÅ čéą░ą║ąČąĄ ąĮąĄčÅą▓ąĮąŠ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ rmt_disable().
rmt_encoder_t::del ą┤ąŠą╗ąČąĮą░ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čĆąĄčüčāčĆčüčŗ, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą║ąŠą┤ąĄčĆąŠą╝.
Copy Encoder. ąÆčŗąĘąŠą▓ rmt_new_copy_encoder() čüąŠąĘą┤ą░ąĄčé ą║ąŠą┐ąĖčÄ ą║ąŠą┤ąĄčĆą░. ą×čüąĮąŠą▓ąĮą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ą║ąŠą┐ąĖąĖ ą║ąŠą┤ąĄčĆą░ čüąŠčüč鹊ąĖčé ą▓ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĖ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT ąĖąĘ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user space) ą▓ čüą╗ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąŁč鹊 ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ const ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą╝ąĄąĮčÅčÄčéčüčÅ runtime ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą║ą░ą║ ą╗ąĖą┤ąĖčĆčāčÄčēąĖą╣ ą║ąŠą┤ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ IR.
ąöąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ čüčéčĆčāą║čéčāčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ rmt_copy_encoder_config_t ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ rmt_new_copy_encoder(). ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čŹčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ čĆą░čüčłąĖčĆąĄąĮąĖčÅ, ąĖ ą┐ąŠą║ą░ ąĮąĄ ąĖą╝ąĄąĄčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ 菹╗ąĄą╝ąĄąĮč鹊ą▓.
Bytes Encoder. ąÜąŠą┤ąĄčĆ ą▒ą░ą╣čé čüąŠąĘą┤ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ rmt_new_bytes_encoder(). ą×čüąĮąŠą▓ąĮąŠąĄ ąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ - ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ą┐ąŠč鹊ą║ ą▒ą░ą╣čé user space ą▓ čüąĖą╝ą▓ąŠą╗čŗ RMT. ąŁč鹊 ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą╗ąĄą╣ ą░ą┤čĆąĄčüą░ ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ IR.
ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ čüčéčĆčāą║čéčāčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ rmt_bytes_encoder_config_t ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ rmt_new_bytes_encoder():
rmt_bytes_encoder_config_t::bit0 ąĖ rmt_bytes_encoder_config_t::bit1 ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ, ą║ą░ą║ ą║ąŠą┤ąĄčĆ ą┐čĆąĄą┤čüčéą▓ą╗čÅąĄčé ą▒ąĖčé 0 ąĖ ą▒ąĖčé 1 ą▓ č乊čĆą╝ą░č鹥 rmt_symbol_word_t.
rmt_bytes_encoder_config_t::msb_first čāčüčéą░ąĮąŠą▓ąĖčé endianness ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ true, č鹊 encoder ą║ąŠą┤ąĖčĆčāąĄčé ą┐ąŠčĆčÅą┤ąŠą║ ą▒ąĖčé ą▓ ą▒ą░ą╣č鹥 ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā MSB (Most Significant Bit, čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝). ąśąĮą░č湥 ą┐ąŠčĆčÅą┤ąŠą║ ą▒ąĖčé ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā LSB ((Least Significant Bit, čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
ą¤ąŠą╝ąĖą╝ąŠ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮčŗčģ ą║ąŠą┤ąĄčĆąŠą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą║ąŠą┤ąĄčĆ, čüąŠąĄą┤ąĖąĮčÅčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓ čåąĄą┐ąŠčćą║čā čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą║ąŠą┤ąĄčĆčŗ. ą×ą▒čŗčćąĮą░čÅ čåąĄą┐ąŠčćą║ą░ ą║ąŠą┤ąĄčĆąŠą▓ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ:
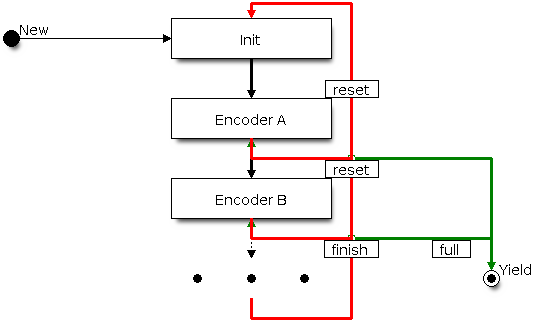
ąĀąĖčü. 5. ą”ąĄą┐ąŠčćą║ą░ RMT Encoder.
Simple Callback Encoder. ą¤čĆąŠčüč鹊ą╣ callback encoder čüąŠąĘą┤ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ rmt_new_simple_encoder(). ąŁč鹊čé ą┐čĆąŠčüč鹊ą╣ callback encoder ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ą░ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī callback-čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ userspace ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čüąĖą╝ą▓ąŠą╗čŗ ą▓ ą┐ąŠč鹊ą║ ą▓čŗą▓ąŠą┤ą░ ą▒ąĄąĘ čåąĄą┐ąŠč湥ą║ čü ą┤čĆčāą│ąĖą╝ąĖ ą║ąŠą┤ąĄčĆą░ą╝ąĖ. ąĪą░ą╝ callback ą┐ąŠą╗čāčćą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą▓ rmt_transmit(), counter ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓, čāąČąĄ ą│ąŠč鹊ą▓čŗčģ ą║ ąĘą░ą┐ąĖčüąĖ callback-čäčāąĮą║čåąĖąĄą╣ ą▓ čŹč鹊ą╣ ą┐ąĄčĆąĄą┤ą░č湥, ąĖ čāą║ą░ąĘą░č鹥ą╗čī, ą║čāą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ RMT, ą░ čéą░ą║ąČąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ čéą░ą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ. ąĢčüą╗ąĖ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ, čćč鹊ą▒čŗ čćč鹊-č鹊 ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī, č鹊 ąŠąĮą░ ą╝ąŠąČąĄčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī 0 ąĖ RMT ą▒čāą┤ąĄčé ąČą┤ą░čéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓, ąĖ callback-čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ čüąĮąŠą▓ą░, č鹥ą┐ąĄčĆčī čāąČąĄ čü ą▒ąŠą╗čīčłąĖą╝ čüą▓ąŠą▒ąŠą┤ąĮčŗą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠą╝. ąĢčüą╗ąĖ callback-čäčāąĮą║čåąĖčÅ čāčüą┐ąĄčłąĮąŠ ąĘą░ą┐ąĖčłąĄčé čüąĖą╝ą▓ąŠą╗čŗ RMT, č鹊 ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓.
ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ čüčéčĆčāą║čéčāčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ rmt_simple_encoder_config_t ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ rmt_new_simple_encoder():
rmt_simple_encoder_config_t::callback ąĖ rmt_simple_encoder_config_t::arg ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé callback-čäčāąĮą║čåąĖčÄ ąĖ ąĮąĄą┐čĆąŠąĘčĆą░čćąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé (opaque), ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
rmt_simple_encoder_config_t::min_chunk_size čāą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą▓ čüąĖą╝ą▓ąŠą╗ą░čģ, ą║čāą┤ą░ ą║ąŠą┤ąĄčĆ čüą╝ąŠąČąĄčé ąĘą░ą┐ąĖčüą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą║ąŠą│ą┤ą░ čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą║ąŠą┤ąĄčĆčā, ąŠąĮ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▓ąŠąĘą▓čĆą░čēą░čéčī 0 (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ą║ąŠą┤ąĄčĆ ą║ąŠą┤ąĖčĆčāąĄčé čüąĖą╝ą▓ąŠą╗čŗ).
ąźąŠčéčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ą┐čĆąŠčåąĄčüčüą░ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą│ąŠ simple callback encoder, ąŠą▒čŗčćąĮąŠ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čāč鹥ą╝ čüą▓čÅąĘčŗą▓ą░ąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą║ąŠą┤ąĄčĆąŠą▓, simple callback ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüčéčŗą╝ ą┤ą╗čÅ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ, č湥ą╝ čåąĄą┐ąŠčćą║ą░ ą║ąŠą┤ąĄčĆąŠą▓.
ąÆ čŹč鹊ą╣ ą▓čĆąĄąĘą║ąĄ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ, ą║ą░ą║ ąĮą░ą┐ąĖčüą░čéčī ą║ąŠą┤ąĄčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┐čāą╗čīčéą░ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ NEC. ą¤čĆąŠč鹊ą║ąŠą╗ NEC IR ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĖą╝ą┐čāą╗čīčüąĮąŠąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ą▒ąĖčé čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ ą┐ą░ą║ąĄčé ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖą╝ąĄąĄčé ą┤ą╗ąĖąĮčā 562.5 ą╝ą║čü, ą╗ąŠą│ąĖč湥čüą║ąĖąĄ ą▒ąĖčéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąĪč鹊ąĖčé čāą┐ąŠą╝čÅąĮčāčéčī, čćč鹊 ą┐ąĄčĆą▓čŗą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą╝ą╗ą░ą┤čłąĖą╣ ąĘąĮą░čćą░čēąĖą╣ ą▒ąĖčé ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░.
ŌĆó ąøąŠą│. 0: ąĖą╝ą┐čāą╗čīčü 562.5 ą╝ą║čü čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ 562.5 ą╝ą║čü, čü ąŠą▒čēąĖą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ 1.125 ą╝čü.
ŌĆó ąøąŠą│. 1: ąĖą╝ą┐čāą╗čīčü 562.5 ą╝ą║čü, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗ 1.6875 ą╝čü, čü ąŠą▒čēąĖą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ 2.25 ą╝čü.
ąÜąŠą│ą┤ą░ ą║ą╗čÄčć ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐čāą╗čīč鹊ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé čüą╗ąĄą┤čāčÄčēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ:

ąĀąĖčü. 6. ąÜą░ą┤čĆ IR NEC.
ŌĆó ąØą░čćą░ą╗čīąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü 9 ą╝čü, čéą░ą║ąČąĄ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ "ąĖą╝ą┐čāą╗čīčüąŠą╝ ąÉąĀąŻ" (AGC).
ŌĆó ąśąĮč鹥čĆą▓ą░ą╗ 4.5 ą╝čü.
ŌĆó 8-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą╗čÅ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ŌĆó 8-ą▒ąĖčéąĮą░čÅ ą╗ąŠą│ąĖč湥čüą║ą░čÅ ąĖąĮą▓ąĄčĆčüąĖčÅ ą░ą┤čĆąĄčüą░.
ŌĆó 8-ą▒ąĖčéąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░.
ŌĆó 8-ą▒ąĖčéąĮą░čÅ ą╗ąŠą│ąĖč湥čüą║ą░čÅ ąĖąĮą▓ąĄčĆčüąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ.
ŌĆó ąÜąŠąĮąĄčćąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü 562.5 ą╝ą║čü ą┤ą╗čÅ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčåą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąŚą░č鹥ą╝ ą▓čŗ ą╝ąŠąČąĄč鹥 čüą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ NEC rmt_encoder_t::encode ą▓ č鹊ą╝ ąČąĄ ą┐ąŠčĆčÅą┤ą║ąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
// ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠą┤ą░ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ IR NEC
typedef struct {
uint16_t address;
uint16_t command;
} ir_nec_scan_code_t;
// ąÜąŠąĮčüčéčĆčāą║čåąĖčÅ ą║ąŠą┤ąĄčĆą░ ą▓ ą▓ąĖą┤ąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮčŗčģ ą║ąŠą┤ąĄčĆąŠą▓
typedef struct {
rmt_encoder_t base; // ą▒ą░ąĘąŠą▓čŗą╣ "class" ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠą┤ąĄčĆą░
rmt_encoder_t *copy_encoder; // copy_encoder ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ
// ąĖ ą║ąŠąĮąĄčćąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░
rmt_encoder_t *bytes_encoder; // bytes_encoder ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ
// ą░ą┤čĆąĄčüą░ ąĖ ą║ąŠą╝ą░ąĮą┤čŗ
rmt_symbol_word_t nec_leading_symbol; // ą╗ąĖą┤ąĖčĆčāčÄčēąĖą╣ ą║ąŠą┤ NEC ą▓ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ RMT
rmt_symbol_word_t nec_ending_symbol; // ąĘą░ą▓ąĄčĆčłą░čÄčēąĖą╣ ą║ąŠą┤ NEC ą▓ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ RMT
int state; // ąĘą░ą┐ąĖčüčī č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ, čé. ąĄ. ą▓ ą║ą░ą║ąŠą╣ čäą░ąĘąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
// ą╝čŗ ąĮą░čģąŠą┤ąĖą╝čüčÅ
} rmt_ir_nec_encoder_t;
static size_t rmt_encode_ir_nec(rmt_encoder_t *encoder, rmt_channel_handle_t channel,
const void *primary_data, size_t data_size,
rmt_encode_state_t *ret_state)
{
rmt_ir_nec_encoder_t *nec_encoder = __containerof(encoder, rmt_ir_nec_encoder_t, base);
rmt_encode_state_t session_state = RMT_ENCODING_RESET;
rmt_encode_state_t state = RMT_ENCODING_RESET;
size_t encoded_symbols = 0;
ir_nec_scan_code_t *scan_code = (ir_nec_scan_code_t *)primary_data;
rmt_encoder_handle_t copy_encoder = nec_encoder->copy_encoder;
rmt_encoder_handle_t bytes_encoder = nec_encoder->bytes_encoder;
switch (nec_encoder->state) {
case 0: // ąŠčéą┐čĆą░ą▓ą║ą░ leading ą║ąŠą┤ą░
encoded_symbols += copy_encoder->encode(copy_encoder, channel,
&nec_encoder->nec_leading_symbol,
sizeof(rmt_symbol_word_t), &session_state);
if (session_state & RMT_ENCODING_COMPLETE) {
nec_encoder->state = 1; // ą╝čŗ ą╝ąŠąČąĄą╝ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ
// č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ č鹥ą║čāčēąĖą╣ ą║ąŠą┤ąĄčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā
} if (session_state & RMT_ENCODING_MEM_FULL) {
state |= RMT_ENCODING_MEM_FULL;
goto out; // ą▓čŗčģąŠą┤, ąĄčüą╗ąĖ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ
// ą┤čĆčāą│ąĖčģ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
}
// ą┐čĆąŠą▓ą░ą╗ąĖą▓ą░ąĄą╝čüčÅ ą┤ą░ą╗čīčłąĄ
case 1: // ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░
encoded_symbols += bytes_encoder->encode(bytes_encoder, channel,
&scan_code->address,
sizeof(uint16_t), &session_state);
if (session_state & RMT_ENCODING_COMPLETE) {
nec_encoder->state = 2; // ą╝čŗ ą╝ąŠąČąĄą╝ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ
// č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ č鹥ą║čāčēąĖą╣ ą║ąŠą┤ąĄčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā
}
if (session_state & RMT_ENCODING_MEM_FULL) {
state |= RMT_ENCODING_MEM_FULL;
goto out; // ą▓čŗčģąŠą┤, ąĄčüą╗ąĖ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ
// ą┤čĆčāą│ąĖčģ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
}
// ą┐čĆąŠą▓ą░ą╗ąĖą▓ą░ąĄą╝čüčÅ ą┤ą░ą╗čīčłąĄ
case 2: // ąŠčéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ
encoded_symbols += bytes_encoder->encode(bytes_encoder, channel,
&scan_code->command,
sizeof(uint16_t), &session_state);
if (session_state & RMT_ENCODING_COMPLETE) {
nec_encoder->state = 3; // ą╝čŗ ą╝ąŠąČąĄą╝ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ
// č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ č鹥ą║čāčēąĖą╣ ą║ąŠą┤ąĄčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čĆą░ą▒ąŠčéčā
}
if (session_state & RMT_ENCODING_MEM_FULL) {
state |= RMT_ENCODING_MEM_FULL;
goto out; // ą▓čŗčģąŠą┤, ąĄčüą╗ąĖ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ
// ą┤čĆčāą│ąĖčģ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
}
// ą┐čĆąŠą▓ą░ą╗ąĖą▓ą░ąĄą╝čüčÅ ą┤ą░ą╗čīčłąĄ
case 3: // ąŠčéą┐čĆą░ą▓ą║ą░ ending ą║ąŠą┤ą░
encoded_symbols += copy_encoder->encode(copy_encoder, channel,
&nec_encoder->nec_ending_symbol,
sizeof(rmt_symbol_word_t), &session_state);
if (session_state & RMT_ENCODING_COMPLETE) {
nec_encoder->state = RMT_ENCODING_RESET; // ąĮą░ąĘą░ą┤ ą║ ąĖąĘąĮą░čćą░ą╗čīąĮąŠą╣ čüąĄčüčüąĖąĖ
// ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
state |= RMT_ENCODING_COMPLETE; // čāą║ą░ąĘčŗą▓ą░ąĄą╝ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╝čā ą║ąŠą┤čā, čćč鹊 ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ
// NEC ąĘą░ą▓ąĄčĆčłąĄąĮąŠ
}
if (session_state & RMT_ENCODING_MEM_FULL) {
state |= RMT_ENCODING_MEM_FULL;
goto out; // ą▓čŗčģąŠą┤, ąĄčüą╗ąĖ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ
// ą┤čĆčāą│ąĖčģ ą░čĆč鹥čäą░ą║č鹊ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
}
}
out:
*ret_state = state;
return encoded_symbols;
}
ą¤ąŠą╗ąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ peripherals/rmt/ir_nec_transceiver. ąÆ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╝ ą▓čŗčłąĄ ą║čāčüą║ąĄ ą║ąŠą┤ą░ ą╝čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ąŠą┐ąĄčĆą░č鹊čĆ switch-case ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ goto ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ. ą¤ąŠ čŹč鹊ą╝čā čłą░ą▒ą╗ąŠąĮčā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé čüą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░čéčī ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ IR-ą┐čĆąŠč鹊ą║ąŠą╗čŗ.
ąĪą╝. čéą░ą║ąČąĄ ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣".
ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ managed-ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░čģ ESP-IDF ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ OneWire (1-Wire):
Dallas 1-Wire Bus Driver site:components.espressif.com
DS18B20 Device Driver site:components.espressif.com
ą¦č鹊ą▒čŗ ą┤ąŠą▒ą░ą▓ąĖčéčī čŹčéąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą▓ čüą▓ąŠą╣ ą┐čĆąŠąĄą║čé, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čŗ:
$ idf.py add-dependency "espressif/onewire_bus^1.0.4"
$ idf.py add-dependency "espressif/ds18b20^0.2.0"
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ RMT ą▓ čüąŠčüčéą░ą▓ąĄ čŹčéąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ (ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ čćč鹥ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS18B20) čüą╝. ą▓ ą┐ą░ą┐ą║ąĄ espressif__ds18b20/examples/ds18b20_read (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ managed_components ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░).
ąÜą░ą║ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą┤ą░čéčćąĖą║ąĖ DS18B20, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čłąĖąĮąĄ 1-Wire:
#define EXAMPLE_ONEWIRE_BUS_GPIO 0
#define EXAMPLE_ONEWIRE_MAX_DS18B20 2
// ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ čłąĖąĮčŗ 1-wire:
onewire_bus_handle_t bus = NULL;
onewire_bus_config_t bus_config = {
.bus_gpio_num = EXAMPLE_ONEWIRE_BUS_GPIO,
.flags = {
.en_pull_up = true, // čĆą░ąĘčĆąĄčłą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ pull-up čĆąĄąĘąĖčüč鹊čĆ ą▓ čüą╗čāčćą░ąĄ,
// ą║ąŠą│ą┤ą░ ąĮą░ ą▓ąĮąĄčłąĮąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĄą│ąŠ ąĮąĄčé
}
};
onewire_bus_rmt_config_t rmt_config = {
.max_rx_bytes = 10, // 1 ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ ROM + 8 ą▒ą░ą╣čé ąĮąŠą╝ąĄčĆą░ ROM
// + 1 ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéčĆąŠą╣čüčéą▓ą░
};
ESP_ERROR_CHECK(onewire_new_bus_rmt(&bus_config, &rmt_config, &bus));
int ds18b20_device_num = 0;
ds18b20_device_handle_t ds18b20s[EXAMPLE_ONEWIRE_MAX_DS18B20];
onewire_device_iter_handle_t iter = NULL;
onewire_device_t next_onewire_device;
esp_err_t search_result = ESP_OK;
// ąĪąŠąĘą┤ą░ąĄčéčüčÅ 1-wire ąĖč鹥čĆą░č鹊čĆ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ:
ESP_ERROR_CHECK(onewire_new_device_iter(bus, &iter));
ESP_LOGI(TAG, "ąĪąŠąĘą┤ą░ąĮ ąĖč鹥čĆą░č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ OneWire, ąĮą░čćąĮąĄą╝ ą┐ąŠąĖčüą║...");
do {
search_result = onewire_device_iter_get_next(iter,
&next_onewire_device);
if (search_result == ESP_OK)
{ // ąĮą░ą╣ą┤ąĄąĮąŠ ąĮąŠą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤čĆąŠą▓ąĄčĆąĖą╝, ą╝ąŠąČąĮąŠ ą╗ąĖ
// čüą┤ąĄą╗ą░čéčī ą░ą┐ą│čĆąĄą╣ą┤ ą┤ąŠ DS18B20
ds18b20_config_t ds_cfg = {};
onewire_device_address_t address;
// ą¤čĆąŠą▓ąĄčĆąĖą╝, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ DS18B20, ąĖ ąĄčüą╗ąĖ čéą░ą║,
// č鹊 ą▓ąŠąĘą▓čĆą░čéąĖą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ds18b20:
if (ESP_OK == ds18b20_new_device_from_enumeration(&next_onewire_device,
&ds_cfg,
&ds18b20s[ds18b20_device_num]))
{
ds18b20_get_device_address(ds18b20s[ds18b20_device_num], &address);
ESP_LOGI(TAG, "ąØą░ą╣ą┤ąĄąĮ DS18B20[%d], ą░ą┤čĆąĄčü: %016llX",
ds18b20_device_num, address);
ds18b20_device_num++;
}
else
{
ESP_LOGI(TAG, "ąØą░ą╣ą┤ąĄąĮąŠ ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą░ą┤čĆąĄčü: %016llX",
next_onewire_device.address);
}
}
} while (search_result != ESP_ERR_NOT_FOUND);
ESP_ERROR_CHECK(onewire_del_device_iter(iter));
ESP_LOGI(TAG, "ą¤ąŠąĖčüą║ ąĘą░ą▓ąĄčĆčłąĄąĮ, ąĮą░ą╣ą┤ąĄąĮąŠ %d čāčüčéčĆąŠą╣čüčéą▓ DS18B20",
ds18b20_device_num);
// ąóąĄą┐ąĄčĆčī čā ą▓ą░čü ąĄčüčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą░čéčćąĖą║ą░ DS18B20, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī
// ąĄą│ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąŚą░ą┐čāčüą║ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ čćč鹥ąĮąĖąĄ čĆąĄąĘčāą╗čīčéą░čéą░:
ESP_ERROR_CHECK(ds18b20_trigger_temperature_conversion_for_all(bus));
for (int i = 0; i < ds18b20_device_num; i ++) {
ESP_ERROR_CHECK(ds18b20_get_temperature(ds18b20s[i], &temperature));
ESP_LOGI(TAG, "temperature read from DS18B20[%d]: %.2fC", i, temperature);
}
ąĪą╝. čéą░ą║ąČąĄ ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣".
[Power Management]
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ą║ą╗čÄč湥ąĮą░ ąŠą┐čåąĖčÅ CONFIG_PM_ENABLE, čüąĖčüč鹥ą╝ą░ ą╝ąŠąČąĄčé ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░čéčī ąĖčüč鹊čćąĮąĖą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ čāčģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ sleep. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▒ą░ąĘą░ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ąĮčāčéčĆąĖ RMT ą╝ąŠąČąĄčé ąĮąĄ čĆą░ą▒ąŠčéą░čéčī čéą░ą║, ą║ą░ą║ ąŠąČąĖą┤ą░ą╗ąŠčüčī.
ąöčĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé čĆąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐čāč鹥ą╝ čüąŠąĘą┤ą░ąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (power management lock). ąóąĖą┐ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░čģ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöčĆą░ą╣ą▓ąĄčĆ ą▒čāą┤ąĄčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā ą▓ rmt_enable(), ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā ą▓ rmt_disable(). ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā ą╗čÄą▒čŗąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ RMT ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▒čāą┤čāčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠ.
[Cache Safe]
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RMT ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą║čŹčł ąŠčéą║ą╗čÄč湥ąĮ ą┐ąŠ čéą░ą║ąĖą╝ ą┐čĆąĖčćąĖąĮą░ą╝, ą║ą░ą║ ąĘą░ą┐ąĖčüčī ąĖą╗ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą╣ čäą╗čŹčł-ą┐ą░ą╝čÅčéąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ąŠą▓čĆąĄą╝čÅ, čćč鹊 ąĮąĄą┐čĆąĖąĄą╝ą╗ąĄą╝ąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ą¦č鹊 ąĄčēąĄ čģčāąČąĄ, ą║ąŠą│ą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ RMT ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ping-pong ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ RMT, ąŠčéą╗ąŠąČąĄąĮąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠą╝čā čĆąĄąĘčāą╗čīčéą░čéčā.
ąśą╝ąĄčÄčéčüčÅ Kconfig-ąŠą┐čåąĖąĖ CONFIG_RMT_TX_ISR_CACHE_SAFE ąĖ CONFIG_RMT_RX_ISR_CACHE_SAFE, ąŠą▒ą╗ą░ą┤ą░čÄčēąĖąĄ čüą╗ąĄą┤čāčÄčēąĖą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝:
1. ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ cache ąĘą░ą┐čĆąĄčēąĄąĮ.
2. ąÆčüąĄ čäčāąĮą║čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ISR, ą┐ąŠą╝ąĄą░čÄčéčüčÅ ą▓ IRAM(2).
3. ą×ą▒čŖąĄą║čé ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ DRAM, ąĄčüą╗ąĖ ąŠąĮ čüą╗čāčćą░ą╣ąĮąŠ ą▒čŗą╗ ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ PSRAM.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (2): callback-čäčāąĮą║čåąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ rmt_tx_event_callbacks_t::on_trans_done, ąĖ čäčāąĮą║čåąĖąĖ, ąĘą░ą┐čāčüą║ą░ąĄą╝čŗąĄ ąĖą╝ čüą░ą╝ąĖą╝, ą┤ąŠą╗ąČąĮčŗ čéą░ą║ąČąĄ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ IRAM, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ čüą░ą╝ąĖ ąŠą▒ čŹč鹊ą╝ ą┐ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ.
ąŁčéą░ ąŠą┐čåąĖčÅ Kconfig ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆą░ą▒ąŠčéą░čéčī, ą║ąŠą│ą┤ą░ cache ąĘą░ą┐čĆąĄčēąĄąĮ, ąĮąŠ čåąĄąĮąŠą╣ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą│ąŠ čĆą░čüčģąŠą┤ą░ IRAM.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ CONFIG_RMT_TX_ISR_CACHE_SAFE, ą▓čŗ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╝ąĄčüčéąĖčéčī ą▓ IRAM čäčāąĮą║čåąĖąĖ ą║ąŠą┤ąĄčĆą░ (ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ rmt_encoder_t::encode ąĖ rmt_encoder_t::reset). ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī RMT_ENCODER_FUNC_ATTR ą┤ą╗čÅ ą┤ąĄą║ąŠčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą░čłąĖčģ čäčāąĮą║čåąĖą╣ ą║ąŠą┤ąĄčĆą░.
ąöčĆčāą│ą░čÅ Kconfig-ąŠą┐čåąĖčÅ CONFIG_RMT_RECV_FUNC_IN_IRAM čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄčüčéąĖčéčī rmt_receive() ą▓ IRAM. ą¦č鹊ą▒čŗ čäčāąĮą║čåąĖčÄ receive ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéą║ą╗čÄč湥ąĮąĮąŠą╝ flash cache.
[Thread Safety]
ąöčĆą░ą╣ą▓ąĄčĆąŠą╝ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ ą┐ąŠč鹊ą║ą░čģ (thread-safe) čäčāąĮą║čåąĖą╣ rmt_new_tx_channel(), rmt_new_rx_channel() ąĖ rmt_new_sync_manager(). ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗąĘčŗą▓ą░čéčī ąĖčģ ąĖąĘ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░čć RTOS ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĘą░čēąĖčēą░čéčī ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ą╝ąĖ. ąöčĆčāą│ąĖąĄ čäčāąĮą║čåąĖąĖ, čā ą║ąŠč鹊čĆčŗčģ rmt_channel_handle_t ąĖ rmt_sync_manager_handle_t čÅą▓ą╗čÅčÄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ ą┐ąŠąĘąĖčåąĖąŠąĮąĮčŗą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝, ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ thread-safe. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĖąĘą▒ąĄą│ą░čéčī ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą│ąĖąĄ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┤ą░čć.
ąÆ ISR-ą║ąŠąĮč鹥ą║čüč鹥 čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖčÄ rmt_receive().
[Kconfig Options]
CONFIG_RMT_TX_ISR_CACHE_SAFE ąĖ CONFIG_RMT_RX_ISR_CACHE_SAFE čāą┐čĆą░ą▓ą╗čÅčÄčé, ą╝ąŠąČąĄčé ą╗ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ISR čĆą░ą▒ąŠčéą░čéčī ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠą│ąŠ cache(3).
CONFIG_RMT_ENABLE_DEBUG_LOG ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą╗ąŠą│ą░ ąŠčéą╗ą░ą┤ą║ąĖ čåąĄąĮąŠą╣ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą▒ąĖąĮą░čĆąĮąŠą│ąŠ ą║ąŠą┤ą░ firmware.
CONFIG_RMT_RECV_FUNC_IN_IRAM čāą┐čĆą░ą▓ą╗čÅąĄčé, ą║čāą┤ą░ ą┐ąŠą╝ąĄčüčéąĖčéčī čäčāąĮą║čåąĖčÄ ą┐čĆąĖąĄą╝ą░ RMT (IRAM ąĖą╗ąĖ Flash)(3).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (3): čüą╝. čéą░ą║ąČąĄ Cache Safe ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
[ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣]
peripherals/rmt/led_strip ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąĄąĮč鹊ą╣ WS2812 LED. ą£ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ LED ą▓ ą╗ąĄąĮč鹥 ąĖ čŹčäč乥ą║čé ą▒ąĄą│čāčēąĄą│ąŠ ąŠą│ąĮčÅ.
peripherals/rmt/led_strip_simple_encoder ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąĄąĮč鹊ą╣ WS2812 LED ą┐čāč鹥ą╝ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ callback-čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ą┐ąĖą║čüąĄą╗ąĖ RGB ą▓ č乊čĆą╝ą░čé, čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĄą╝čŗą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣.
peripherals/rmt/ir_nec_transceiver ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RMT ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ IR NEC.
peripherals/rmt/dshot_esc ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ąĮą░ą╗ RMT TX ą┤ą╗čÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čåąĖą║ą╗ąĄ. ąÜąŠąĮčüčéčĆčāąĖčĆčāąĄčéčüčÅ ą║ąŠą┤ąĄčĆ RMT ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ DShot. ąŁč鹊čé ą┐čĆąŠč鹊ą║ąŠą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā ą┐ąŠą╗ąĄčéąĮčŗą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ čģąŠčĆąŠčłčāčÄ ąĘą░čēąĖčēąĄąĮąĮąŠčüčéčī ąŠčé 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖčģ ą┐ąŠą╝ąĄčģ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ.
peripherals/rmt/onewire ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ čüąĖą╝čāą╗ąĖčĆąŠą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ 1-wire čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ onewire_bus, ąĖ čüčćąĖčéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┤ą░čéčćąĖą║ąŠą▓ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS18B20, ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ. ąŁčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čüąŠą▒čĆą░ąĮą░ ąĮą░ ą┐ą░čĆąĄ ą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ RMT.
peripherals/rmt/musical_buzzer ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ąĮą░ą╗ RMT TX ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ą┐ąĖčēą░ą╗ą║ąŠą╣, čćč鹊ą▒čŗ ą┐čĆąŠąĖą│čĆą░čéčī ą┐čĆąŠčüčéčāčÄ ą╝ąĄą╗ąŠą┤ąĖčÄ. ąÜą░ąČą┤ą░čÅ ą╝čāąĘčŗą║ą░ą╗čīąĮą░čÅ ąĮąŠčéą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ čüąĖą│ąĮą░ą╗ą░ PWM čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ.
[FAQ]
ą¤ąŠč湥ą╝čā RMT ą┐ąĄčĆąĄą┤ą░ąĄčé ą▒ąŠą╗čīčłąĄ ą┤ą░ąĮąĮčŗčģ, č湥ą╝ ąŠąČąĖą┤ą░ą╗ąŠčüčī?
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ RMT ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ISR. ąĢčüą╗ąĖ ą┐čĆąŠčåąĄčüčü ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ RMT ąĘą░čéčÅąĮąĄčéčüčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘ-ąĘą░ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ ąĖą╗ąĖ čéčĆą░čüčüąĖčĆąŠą▓ą║ąĖ ą┐čĆąŠčåąĄą┤čāčĆčŗ), ąĖą╗ąĖ ąĄčüą╗ąĖ ąŠąĮ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĖąĘ-ąĘą░ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą▓čŗč鹥čüąĮčÅčÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, č鹊 ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠą┤ąĄčĆ ąĘą░ą┐ąĖčłąĄčé ą▓ ąĮąĄąĄ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▒čāą┤ąĄčé ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ ąĖč鹊ą│ąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī čāčüčéą░čĆąĄą▓čłąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąźąŠčéčÅ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā čüą┤ąĄą╗ą░čéčī ą┐ą░čāąĘčā ąĖ ą┐ąŠą┤ąŠąČą┤ą░čéčī, čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ čĆąĄčłąĖčéčī, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ čüą╗ąĄą┤čāčÄčēąĖčģ čüčéčĆą░č鹥ą│ąĖą╣:
- ąŻą▓ąĄą╗ąĖčćąĖčéčī rmt_tx_channel_config_t::mem_block_symbols, čłą░ą│ą░ą╝ąĖ ą┐ąŠ 48.
- ą¤ąŠą╝ąĄčüčéąĖčéčī čäčāąĮą║čåąĖčÄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ IRAM čü ą┐ąŠą╝ąŠčēčīčÄ ą░čéčĆąĖą▒čāčéą░ IRAM_ATTR.
- ąĀą░ąĘčĆąĄčłąĖčéčī rmt_tx_channel_config_t::with_dma, ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĄąĮ DMA.
- ąśąĮčüčéą░ą╗ą╗ąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ RMT ąĮą░ ąŠčéą┤ąĄą╗čīąĮąŠą╝ čÅą┤čĆąĄ CPU, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ čĆąĄčüčāčĆčüąŠą▓ ąĮą░ ąŠą┤ąĮąŠą╝ ąĖ č鹊ą╝ ąČąĄ CPU čü ą┤čĆčāą│ąĖą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą░ą║čéąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║ąĖą╝ąĖ, ą║ą░ą║ WiFi, Bluetooth).
[ąĪą┐čĆą░ą▓ąŠčćąĮąĖą║ ą┐ąŠ API]
ążą░ą╣ą╗čŗ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░:
components/esp_driver_rmt/include/driver/rmt_tx.h
components/esp_driver_rmt/include/driver/rmt_rx.h
components/esp_driver_rmt/include/driver/rmt_common.h
components/esp_driver_rmt/include/driver/rmt_encoder.h
components/esp_driver_rmt/include/driver/rmt_types.h
components/hal/include/hal/rmt_types.h
ąŁčéąĖ čäą░ą╣ą╗čŗ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąĖčĆąĄą║čéąĖą▓ą░ą╝ąĖ:
#include "driver/rmt_tx.h"
#include "driver/rmt_rx.h"
#include "driver/rmt_common.h"
#include "driver/rmt_encoder.h"
#include "driver/rmt_types.h"
#include "hal/rmt_types.h"
ąŁčéąĖ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ ą┤ąĄą║ą╗ą░čĆąĖčĆčāčÄčé API, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą╝ esp_driver_rmt. ą¦č鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čćč鹊 ą▓ą░čł ą║ąŠą╝ą┐ąŠąĮąĄąĮčé (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ main, ą║ąŠč鹊čĆąŠąĄ č鹊ąČąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą╝), ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ čüą▓ąŠą╣ CMakeLists.txt:
REQUIRES esp_driver_rmt
ąĖą╗ąĖ
PRIV_REQUIRES esp_driver_rmt
ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ API-čäčāąĮą║čåąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ RMT. ą¤ąŠą╗ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čüčéčĆčāą║čéčāčĆ ąĖ čéąĖą┐ąŠą▓ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1].
| ążčāąĮą║čåąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| rmt_new_tx_channel |
ąĪąŠąĘą┤ą░ąĄčé ą║ą░ąĮą░ą╗ RMT TX. |
| rmt_transmit |
ą¤ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ RMT TX. |
| rmt_tx_wait_all_done |
ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ TX. |
| rmt_tx_register_event_callbacks |
ąŻčüčéą░ąĮąŠą▓ąĖčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ čüąŠą▒čŗčéąĖą╣ (event callbacks) ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT TX. |
| rmt_new_sync_manager |
ąĪąŠąĘą┤ą░čüčé ą╝ąĄąĮąĄą┤ąČąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (sync manager) ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ TX, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ąĖą╝ ą║ą░ąĮą░ą╗čŗ ą╝ąŠą│ą╗ąĖ ąĮą░čćą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. |
| rmt_del_sync_manager |
ąŻą┤ą░ą╗ąĖčé ą╝ąĄąĮąĄą┤ąČąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. |
| rmt_sync_reset |
ąĪą▒čĆąŠčüąĖčé ą╝ąĄąĮąĄą┤ąČąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. |
| rmt_tx_switch_gpio |
ą¤ąĄčĆąĄą║ą╗čÄčćąĖčé GPIO ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT TX. |
| rmt_new_rx_channel |
ąĪąŠąĘą┤ą░čüčé ą║ą░ąĮą░ą╗ RMT RX. |
| rmt_receive |
ąśąĮąĖčåąĖąĖčĆčāąĄčé ąĘą░ą┤ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT RX. |
| rmt_rx_register_event_callbacks |
ąŻčüčéą░ąĮąŠą▓ąĖčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ čüąŠą▒čŗčéąĖą╣ (event callbacks) ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RMT RX. |
| rmt_del_channel |
ąŻą┤ą░ą╗ąĖčé ą║ą░ąĮą░ą╗ RMT. |
| rmt_apply_carrier |
ą¤čĆąĖą╝ąĄąĮąĖčé čäąĖčćčā ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ TX ąĖą╗ąĖ čäąĖčćčā ą┤ąĄą╝ąŠą┤čāą╗čÅčåąĖąĖ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ RX. |
| rmt_enable |
ąĀą░ąĘčĆąĄčłąĖčé ą║ą░ąĮą░ą╗ RMT. |
| rmt_disable |
ąŚą░ą┐čĆąĄčéąĖčé ą║ą░ąĮą░ą╗ RMT. |
| rmt_new_bytes_encoder |
ąĪąŠąĘą┤ą░čüčé ą║ąŠą┤ąĄčĆ ą▒ą░ą╣čé RMT, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī ą┐ąŠč鹊ą║ ą▒ą░ą╣čé ą▓ čüąĖą╝ą▓ąŠą╗čŗ RMT. |
| rmt_bytes_encoder_update_config |
ą×ą▒ąĮąŠą▓ąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą║ąŠą┤ąĄčĆą░ ą▒ą░ą╣čé. |
| rmt_new_copy_encoder |
ąĪąŠąĘą┤ą░čüčé ą║ąŠą┐ąĖčÄ ą║ąŠą┤ąĄčĆą░ RMT, ą║ąŠč鹊čĆčŗą╣ ą║ąŠą┐ąĖčĆčāąĄčé čāą║ą░ąĘą░ąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ RMT ą▓ ą┐ą░ą╝čÅčéčī RMT. |
| rmt_new_bitscrambler_encoder |
ąĪąŠąĘą┤ą░ąĄčé ą║ąŠą┤ąĄčĆ RMT BitScrambler. |
| rmt_new_simple_encoder |
ąĪąŠąĘą┤ą░ąĄčé RMT simple callback encoder, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ ą▓ čüąĖą╝ą▓ąŠą╗čŗ RMT. |
| rmt_del_encoder |
ąŻą┤ą░ą╗ąĖčé ą║ąŠą┤ąĄčĆ RMT. |
| rmt_encoder_reset |
ąĪą▒čĆąŠčüąĖčé ą║ąŠą┤ąĄčĆ RMT. |
| rmt_alloc_encoder_mem |
ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą║ąŠą┤ąĄčĆčā RMT. |
[ąĪčüčŗą╗ą║ąĖ]
1. Remote Control Transceiver (RMT) site:docs.espressif.com.
2. Composite pattern site:wikipedia.org. |



