|
ąöą░čéčćąĖą║ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĄčéčĆą░ CYC-FX1-KV-A1 (ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą║ąĖčéą░ą╣čüą║ąŠą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĖ WUHAN CHENYUN Technology Co., Ltd) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ čüą▓ąŠą▒ąŠą┤ąĮąŠ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░čÄčēąĖą╣čüčÅ čäą╗čÄą│ąĄčĆ čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ č鹊ą║ąŠą▓čŗą╝ ą▓čŗčģąŠą┤ąŠą╝.

ą¤ąĖčéą░ąĄčéčüčÅ ą┤ą░čéčćąĖą║ ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ DC 9V .. 30V, ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ čéčĆąĄą╝čÅ ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ:
ąÜčĆą░čüąĮčŗą╣ DC 9V .. 30V
ą¢ąĄą╗čéčŗą╣ ąÆčŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗
ą¦ąĄčĆąĮčŗą╣ ą×ą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤, GND
ąóąŠą║ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┤ą░čéčćąĖą║ą░ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗ąĄąĮ čāą│ą╗čā ą┐ąŠą▓ąŠčĆąŠčéą░ čäą╗čÄą│ąĄčĆą░: 4 .. 20 ą╝ąÉ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāą│ą╗ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ 0 .. 359 ą│čĆą░ą┤čāčüąŠą▓. ą×čé čāą│ą╗ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ čéą░ą║ąČąĄ ąĘą░ą▓ąĖčüąĖčé ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║: ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ 12V ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║ čüąŠčüčéą░ą▓ąĖčé ąŠą║ąŠą╗ąŠ 26 ą╝ąÉ.
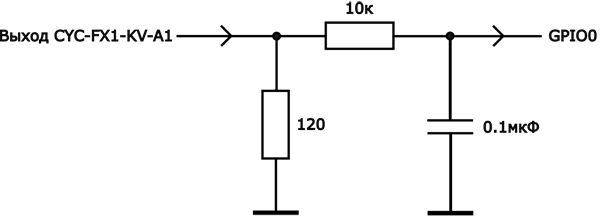
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓čŗčģąŠą┤ ą┤ą░čéčćąĖą║ą░ ą║ ąÉą”ą¤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĄą│ąŠ ą▓čŗčģąŠą┤ ąĮčāąČąĮąŠ ąĮą░ą│čĆčāąĘąĖčéčī ąĮą░ ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ. ąÆ čüą╗čāčćą░ąĄ ąÉą”ą¤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ESP32-C3 ąĮąŠą╝ąĖąĮą░ą╗ čŹč鹊ą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 120 ą×ą╝, č鹊ą│ą┤ą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čģąŠą┤ąĄ ąÉą”ą¤ ą┐ąŠą╗čāčćąĖčéčüčÅ 2.4V, čćč鹊 ą┐čĆąĖ ąŠčüą╗ą░ą▒ą╗ąĄąĮąĖąĖ ąĮą░ ą▓čģąŠą┤ąĄ 11 db ą║ą░ą║ čĆą░ąĘ ą▒čāą┤ąĄčé ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0 .. 2.5V (čüą╝. [1]).
ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ ą║ ą║ą░ąĮą░ą╗čā A0 (GPIO0) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ESP32-C3:
ąÜąŠą┤ ąŠą┐čĆąŠčüą░ ą┤ą░čéčćąĖą║ą░ CYC-FX1-KV-A1:
#include "esp_log.h"
#include "esp_err.h"
#include "esp_adc/adc_oneshot.h"
#include "adcapp.h"
#include "pins.h"
#include "task_priorities.h"
#include "nvsapp.h"
static const char *TAG = "adcapp";
static adc_oneshot_unit_handle_t adc1_handle; // ąöąĄčüą║čĆąĖą┐č鹊čĆ ąÉą”ą¤
bool adc_test_enabled = false;
// ążčāąĮą║čåąĖčÅ čüčćąĖčéčŗą▓ą░ąĮąĖčÅ čüčŗčĆąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ADC ąĖąĘ ą▓čģąŠą┤ą░ GPIO0
esp_err_t get_adc_gpio0_raw(int *raw)
{
esp_err_t ret;
do
{
adc_oneshot_unit_init_cfg_t init_config1 = {
.unit_id = ADC_UNIT_1, // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ ą╝ąŠą┤čāą╗čī ADC1
.ulp_mode = ADC_ULP_MODE_DISABLE, // ą×čéą║ą╗čÄčćą░ąĄą╝ čĆąĄąČąĖą╝ ULP (ą┤ą╗čÅ
// ą┐čĆąŠčüčéčŗčģ ąĘą░ą┤ą░čć ąĮąĄ ąĮčāąČąĄąĮ)
};
// ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░ ąÉą”ą¤
adc_oneshot_chan_cfg_t config = {
.atten = ADC_ATTEN_DB_12, // ą×čüą╗ą░ą▒ą╗ąĄąĮąĖąĄ 12 ą┤ąæ (ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0 ą╝ąÆ - 2500 ą╝ąÆ)
.bitwidth = ADC_BITWIDTH_DEFAULT, // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (12 ą▒ąĖčé)
}; // ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ ą▒ą╗ąŠą║ ąÉą”ą¤
ret = adc_oneshot_new_unit(&init_config1, &adc1_handle);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "ą×čłąĖą▒ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠą┤čāą╗čÅ ąÉą”ą¤: %s", esp_err_to_name(ret));
break;
}
// ąØą░čüčéčĆą░ąĖą▓ą░ąĄą╝ ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ ą║ą░ąĮą░ą╗ (ADC_CHANNEL_0 ąĮą░ ADC1)
ret = adc_oneshot_config_channel(adc1_handle, ADC_CHANNEL_0, &config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "ą×čłąĖą▒ą║ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ą░ąĮą░ą╗ą░: %s", esp_err_to_name(ret));
break;
}
ESP_LOGI(TAG, "ąÉą”ą¤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. ąØą░čćąĖąĮą░ąĄą╝ čćč鹥ąĮąĖąĄ čü ADC1_CHANNEL_0...");
// ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖą╝ ąŠą┤ąĖąĮąŠčćąĮąŠąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ
ret = adc_oneshot_read(adc1_handle, ADC_CHANNEL_0, raw);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "ą×čłąĖą▒ą║ą░ čćč鹥ąĮąĖčÅ ąÉą”ą¤: %s", esp_err_to_name(ret));
}
adc_oneshot_del_unit(adc1_handle);
}while(false);
return ret;
}
static void adcTask(void *pvParameters)
{
int imin, imax;
imin = 65535;
imax = 0;
printf("ADC test started\n");
while(adc_test_enabled)
{
int raw;
esp_err_t ret = get_adc_gpio0_raw(&raw);
if (ret == ESP_OK) {
ESP_LOGI(TAG, "ADC1_CHANNEL_0: %d", raw);
if (raw < imin) imin = raw;
if (raw > imax) imax = raw;
uint16_t deg = map_to_degree_float(raw, a0min, a0max);
//uint16_t deg = map_to_degree_optimized(raw, a0min, a0max);
printf("\r%4d a0min=%4d a0max=%4d ą│čĆą░ą┤=%3u", raw, imin, imax, deg);
}
vTaskDelay(pdMS_TO_TICKS(100));
}
vTaskDelete(NULL);
}
void adc_test_start(void)
{
adc_test_enabled = true;
esp_log_level_set("gpio", ESP_LOG_ERROR); // ąóąŠą╗čīą║ąŠ ąŠčłąĖą▒ą║ąĖ
esp_log_level_set("adcapp", ESP_LOG_ERROR); // ąóąŠą╗čīą║ąŠ ąŠčłąĖą▒ą║ąĖ
xTaskCreate(&adcTask, "adcTask", 4096, NULL, PRIORITY_ADC_TEST, NULL);
}
void adc_test_stop(void)
{
adc_test_enabled = false;
}
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮ ą┤čĆą░ą╣ą▓ąĄčĆ čĆąĄąČąĖą╝ą░ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ąÉą”ą¤ (one shot mode). ąĪčŗčĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čüčćąĖčéčŗą▓ą░ąĄą╝ąŠąĄ čü ąÉą”ą¤, ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖčÅ 0┬░ .. 360┬░ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ map_to_degree_float. ąŚąĮą░č湥ąĮąĖčÅ a0min ąĖ a0max čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĘąĮą░č湥ąĮąĖčÅą╝, čüčćąĖčéą░ąĮąĮčŗą╝ čü ą║ą░ąĮą░ą╗ą░ A0 ąÉą”ą¤ ą┐čĆąĖ č鹊ą║ąĄ 4 ą╝ąÉ ąĖ 20 ą╝ąÉ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
uint16_t map_to_degree_float(uint16_t value, uint16_t a0min, uint16_t a0max) {
if (value <= a0min) return 0;
if (value >= a0max) return 359;
float result = (float)(value - a0min) * 359.0f / (float)(a0max - a0min);
return (uint16_t)(result + 0.5f); // ą×ą║čĆčāą│ą╗ąĄąĮąĖąĄ ą┤ąŠ ą▒ą╗ąĖąČą░ą╣čłąĄą│ąŠ
}
[ąĪčüčŗą╗ą║ąĖ]
1. ESP32-C3: čĆą░ą▒ąŠčéą░ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ąÉą”ą¤. |



